Pick and Place Robots: An In-Depth Guide to Their Functionality and Applications

25 Mar, 2024

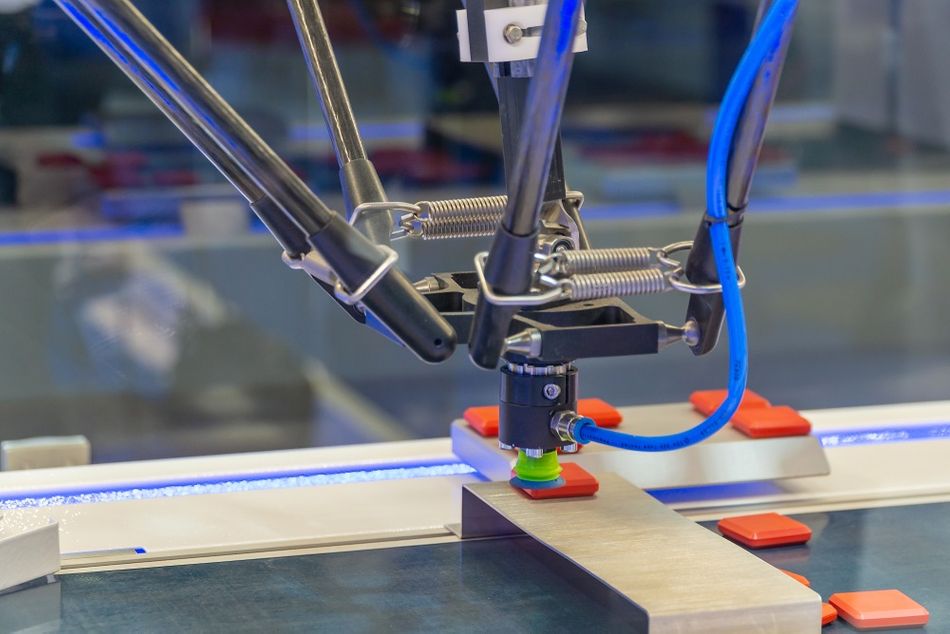
A pick and place robot in an industrial setup
Understanding the inception, evolution, composition, and types of pick and place robots and their impact on various industrial sectors
What are Pick and Place Robots?
Pick and place robots are industrial robots, specifically designed to pick up objects from one location and place them in another. These robotic systems are a crucial component in many manufacturing and production lines for automating repetitive, time-consuming, and potentially hazardous tasks such as:
- Stacking
- Sorting
- Placing
Pick-and-place robots are one of the major innovations, heavily contributing to the growth of industrial robotics. These robots can reach a throughput of up to 200 products per minute with a placement error of less than a millimetre. There is a wide range of pick and place robots, from basic to advanced, but each robot is designed on the following fundamental principles.
Programming
The robots are typically programmed to follow a specific sequence of movements, which allows them to perform their tasks with a high degree of precision and consistency. This sequence of movements is determined by the robot's end effector, which is the component that physically interacts with the objects being moved.
Sensor Integration
Pick-and-place robots are often equipped with sensors that allow them to detect the presence and position of objects in their environment. These sensors can include vision systems, force sensors, and proximity sensors, among others. The data collected by these sensors is used to guide the robot's movements and ensure that it can accurately pick up and place objects, even if their position varies slightly from what was expected.
Mechanical Design
The speed and efficiency of pick-and-place robots are largely determined by their mechanical design. These robots are typically designed to minimize the distance that objects need to be moved and to maximize the speed at which these movements can be performed. This often involves the use of lightweight materials, high-speed motors, and sophisticated control algorithms.

A typical pick-and-place robot consists of several key components that affect its design, configuration and performance. These include:
- End Effector - Used to pick up and place objects.
- Arm - Responsible for moving the end effector to the desired locations.
- Controller - Used to program and control the robot's movements.
- Sensors - Provides the robot with information about its environment.
History of Pick and Place Robots
The history of pick-and-place robots is a fascinating journey that reflects the broader evolution of robotics and automation technologies. The first industrial robots, which appeared in the 1960s, were simple machines that could perform repetitive tasks with a high degree of precision. However, they lacked the flexibility and adaptability that characterize modern pick and place robots.
The development of pick-and-place robots was driven by the need for automated applications. These applications required a high degree of precision and consistency but were too repetitive or hazardous for human workers. Typically, these tasks included:
- Assembling electronic components
- Packaging products
- Handling materials in hazardous environments
Unimate - The First Programmable Pick-and-Place Robot
The development of Unimate marks one of the key milestones in the evolution of pick and place robots. It was the first programmable industrial robot developed in 1961. Developed by George Devol, and Joseph Engelberger, the Unimate could perform a variety of tasks by following a pre-programmed sequence of movements. It was a six-DoF robot that emulated the human shoulder, elbow, and wrist. It led to the development of more sophisticated programmable robots that could perform complex tasks with high precision and flexibility.
Some Major Breakthroughs in Industrial Pick and Place Robots
Following the Unimate, some of the breakthroughs in industrial robots included:
- Stanford Arm (1969) - First all-electric manipulator
- Famulus (1973) - First robot to have six electromechanical driven axes
- IRB-6 (1974) - First all-electric industrial robot
- PUMA Robot (1978) - Anthromorphic robot
- SCARA Robot (1978) - Suited for assembly of small parts
Advanced Sensing and Vision-based Robots
The 1980s and 1990s saw the introduction of robots with advanced sensing capabilities, which allowed them to interact more effectively with their environment. These robots were equipped with vision systems, force sensors, and other technologies that allowed them to detect the presence and position of objects, and to adjust their movements accordingly. It marked a significant step in the development of pick and place robots, allowing them to perform tasks with a higher degree of accuracy and adaptability.
The evolution of pick and place robots also picked up due to the following factors:
- Technological advancements such as sensor development and integration.
- Advancements in material sciences lead to lighter and more durable robots.
- Improvement in motor technology for faster and more precise movements.
- Enhanced computer technology to accommodate sophisticated control algorithms, allowing robots to perform complex tasks with ease.
Recommended Reading: A History of Industrial Robots (wevolver.com)
Types of Pick and Place Robots
Pick and place robots come in various types, each with its unique features and applications. The main types of pick and place robots are Cartesian, SCARA, and Delta robots.
Cartesian Robots
Cartesian robots, named after the Cartesian coordinate system, operate on three linear axes (X, Y, and Z) using a square or rectangular working envelope. Typically, Cartesian robots have three degrees of freedom plus the optional rotation. They are the simplest type of robot in terms of mechanical design, which contributes to their reliability and ease of use.
The unique features of Cartesian robots include their linear movements, which allow for precise positioning of objects. This makes them particularly suitable for tasks such as assembly, inspection, and material handling, where precision is paramount.
Cartesian robots are used in a wide range of applications such as:
- Small-scale operations such as electronic assembly
- Large-scale operations such as automotive assembly.
Moreover, they are particularly popular in industries where high precision and reliability are required, such as electronics, pharmaceuticals, and food and beverage. Likewise, they are widely used in 3D printing and CNC applications.
The advantages of using Cartesian robots include their high precision, reliability, and ease of programming. However, they also have some disadvantages. For instance, their linear movements can be less efficient than the rotational movements of other types of robots, and their size and weight can make them less suitable for space-constrained environments. Moreover, they are not suitable if the applications require higher degrees of freedom.
SCARA Robots
SCARA stands for Selective Compliance Assembly Robot Arm. SCARA robots are a type of pick-and-place robots that are known for their speed, precision, and compact design. They operate within a two-dimensional space defined by the X and Y axes, with an additional rotational movement around the vertical Z axis. This allows them to perform tasks such as assembly, packaging, and material handling with a high degree of speed and precision.
The unique features of SCARA robots include:
- The ability to perform both linear and rotational movements, which allows them to handle objects with complex shapes and orientations.
- Their compact design makes them suitable for use in space-constrained environments.

SCARA robots are used in a wide range of applications, from small-scale operations such as electronic assembly to large-scale operations such as automotive assembly. They are particularly popular in high-speed and precision industries, such as electronics, pharmaceuticals, and food and beverage.
While they are fast and precise, their two-dimensional movements and limited degrees of freedom can reduce their flexibility in handling objects with complex shapes and orientations. Despite these challenges, SCARA robots remain a popular choice for many pick-and-place applications due to their speed, precision, and compact design.
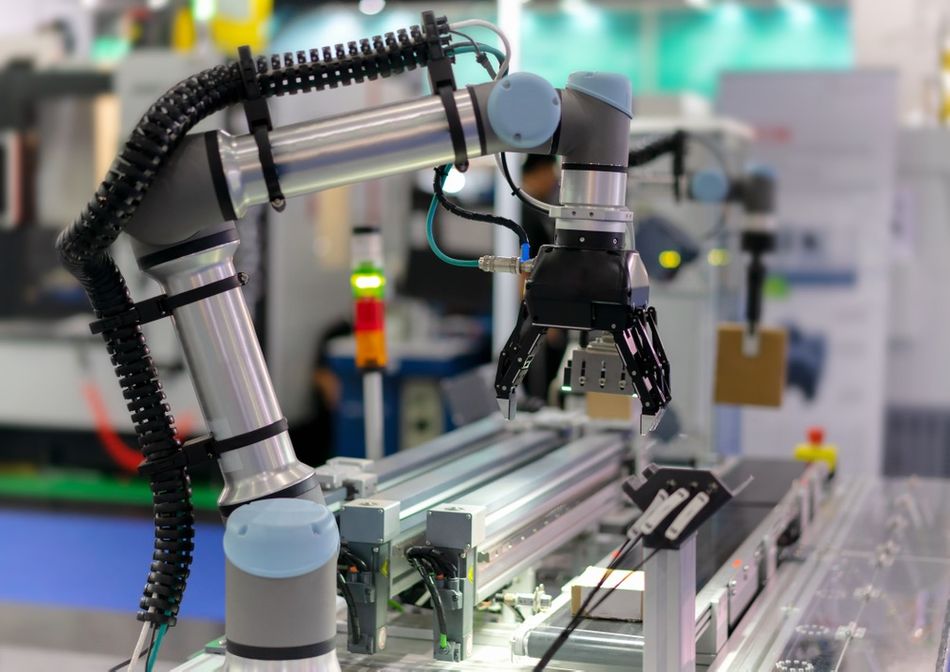
Collaborative Robots
Collaborative Robots, or Cobots work alongside humans. The idea behind these robots is to assist humans, not to replace them. Collaborative robots are designed for safe human-robot interaction. Built with lightweight materials and rounded edges, they prioritize safety to working in shared spaces.
Cobots are typically smaller and more adaptable than traditional industrial robots. They can be programmed relatively easily, making them ideal for repetitive tasks that change frequently. This allows for faster integration and reduced set-up costs compared to complex industrial robots.

Cobots can be used in assembly lines, performing tasks like material handling, product testing, and packaging. In healthcare, they can assist with lab tasks or even medication dispensing. They are also making their way into agriculture and food service for tasks like fruit picking and food preparation. Some modern cobots have multisensing capabilities.
They are equipped with advanced sensors and AI, allowing them to distinguish humans from other objects, which improves safety in collaborative working environments.
Further Reading: MAiRA Smart Cobot Promises Next-Level Cognition and Interaction
Cobots offer several advantages such as:
- Improved productivity with automation of tedious tasks, eventually freeing up human workers for more complex jobs.
- Enhanced accuracy and consistency leading to fewer errors and higher-quality products.
- Easy integration into existing workspaces thanks to their small footprint.
Delta Robots
Delta robots are distinguished by their unique kinematic chains, which consist of parallel arms connected to a common base. This design allows for very fast and precise movements in a three-dimensional space.
Delta robots typically feature a triangular base from which three or four lightweight arms extend and support a centrally located end effector. The arms are controlled by servo motors located at the base, which manipulate the arms' length and angle to position the end effector.
Their design offers several advantages such as:
- High speed and acceleration due to the low inertia of the lightweight arms, make them well-suited for high-speed pick-and-place actions.
- The parallel arm structure also provides a high degree of stiffness, which contributes to the robot's precision and repeatability.
Delta robots are commonly used in high-throughput applications, such as food processing. They are also common in the pharmaceutical industry for the packaging of medicines due to their ability to handle delicate items with care.
One of the key technical specifications of Delta robots is their operational speed, which can reach up to several hundred picks per minute. Their working envelope is typically circular with a dome-shaped work volume, which is defined by the design of the arms and the range of motion allowed by the joints. The precision of Delta robots can be within fractions of a millimeter, making them highly effective for tasks that require exact placement.
Despite their advantages, Delta robots do have limitations. Their design can restrict the payload they can carry, and their work envelope may not be as large as that of Cartesian or SCARA robots. Additionally, the complexity of their control systems can make them more challenging to program and integrate into existing workflows.
Recommended Reading: 7 Types of Industrial Robots: Advantages, Disadvantages, Applications, and More
Components of Pick and Place Robots
Modern pick and place robots are complex systems that consist of multiple integrated components, each serving a specific function to ensure the robot operates efficiently and effectively. The primary components include the robotic arm, end effectors, controllers, and sensors.
Here is a detailed description of each component.
End Effectors
End effectors are the physical interface between the pick-and-place robot and the objects it handles. They are designed to mimic the action of picking up and placing items, similar to a human hand, but with a variety of mechanisms suited to different tasks. The design of an end effector is critical as it directly affects the robot's ability to perform its intended function.
There are several types of end effectors used in pick and place robots, each with its own set of characteristics:
- Vacuum Grippers - Use suction to hold onto objects and are ideal for smooth, non-porous items.
- Mechanical Grippers - Use fingers or jaws to grasp objects and can handle a wider range of shapes and sizes.
- Magnetic and Adhesive Grippers - Used for specific applications where vacuum or mechanical gripping is not feasible.

The choice of end effector impacts the robot's functionality in several ways. It determines the types of objects the robot can handle, the speed at which it can operate, and the precision of its movements. For instance, a vacuum gripper may pick up objects quickly but may not be suitable for porous items, whereas a mechanical gripper might handle a variety of objects but with slower operation.
End effectors also contain sensors that provide feedback on the gripping process. It ensures that objects are securely held and accurately placed. This feedback is crucial for maintaining the quality and consistency of the robot's operations, especially in high-speed or high-precision tasks.
Controllers
Controllers are the central processing units of pick and place robots, responsible for executing the commands that drive the robot's movements. They are composed of both hardware and software components that work together to control the robot's actions.
The hardware typically includes a processor, memory, and interfaces for communication with the robot's motors and sensors. The software, on the other hand, includes the operating system, drivers, and application programs that define the robot's tasks.
Movement Control
Controllers receive input from the robot's sensors and interpret this data to determine the appropriate actions. For instance, a vision system might detect the position and orientation of an object, and the controller would then calculate the necessary movements for the robotic arm and end effector to pick up and place the object accurately. This process involves complex algorithms and real-time computations to ensure the robot operates with high speed and precision.
There are several types of robotic controllers such as:
- PID Controllers
- Fuzzy Logic Controllers
- Adaptive Controllers
- Neural Network Controllers
- Predictive Controllers
- Robust Controllers
- Optimal Controllers
Further Reading: Microcontroller Programming: Mastering the Foundation of Embedded Systems
Safety Functions
Controllers also manage the robot's safety functions. They monitor the robot's internal state and its environment to prevent collisions and ensure safe operation. For example, if a sensor detects an unexpected obstacle in the robot's path, the controller would immediately halt the robot's movements to avoid a collision.
Programming Interface
Controllers also provide the interface for programming the robot's tasks. This can be done through a variety of methods, including teach pendants, graphical programming interfaces, or high-level programming languages. The choice of programming method depends on the complexity of the tasks and the level of flexibility required.
Sensors
Sensors in pick and place robots are integral for providing the necessary feedback to ensure precise and accurate operations. They are the components that allow the robot to interact with its environment by providing data that is critical for decision-making processes.
The types of sensors used in pick and place robots vary widely depending on the application but generally include vision systems, force and torque sensors, and proximity sensors.
- Vision Sensors - Pick and place robots use vision systems (cameras) to "see" objects, figure out their position, and pick them up accurately. These systems can be simple 2D cameras or complex 3D for precise positioning.
- Force Sensors - Usually present in the wrist or end effector, force sensors are used to detect the force and torque applied by the robot when gripping objects, which is particularly important when handling delicate or variable items, allowing the robot to adjust its grip strength dynamically.
- Proximity Sensors - These are ultrasonic and infrared sensors, used to detect the presence of objects or obstacles in the robot's working area. They help in collision avoidance and ensure the safety of the robot's operation by preventing unintended contact with objects or human operators.
Further Reading: Types of Sensors in Robotics
Applications of Pick and Place Robots
As pick and place robots can automate various industrial taskes, they have rightfully revolutionized numerous industries, especially the process of picking up items from one location and placing them in another. Their precision, speed, and reliability make them ideal for a variety of applications, significantly improving efficiency and productivity.
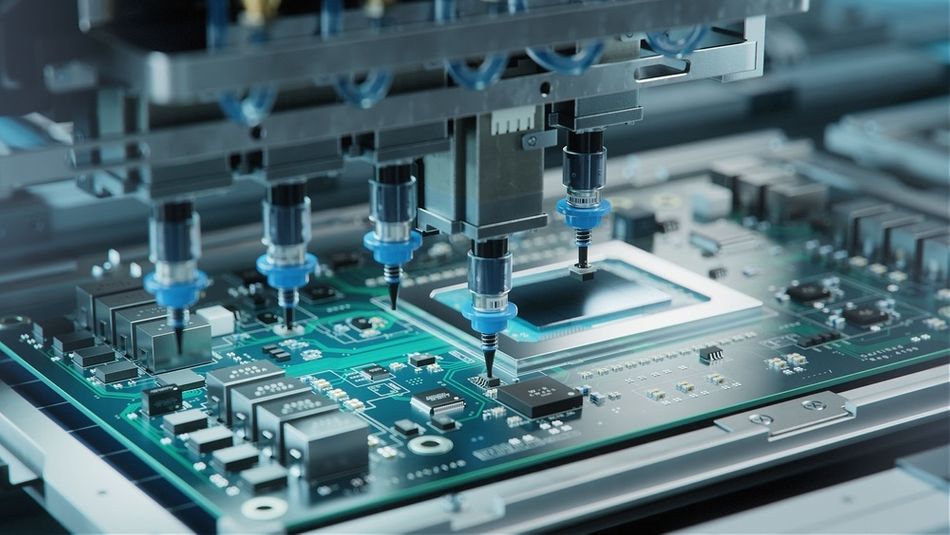
Manufacturing Industry
Pick and place robots enhance production rates and ultimately reduce labor costs in the manufacturing industry. The automated processes also improve overall worker safety, as they take over tasks that are dangerous or ergonomically unfavorable for human workers
.One of the primary uses of pick and place robots in manufacturing is in the assembly of small, intricate parts. For example, in the electronics industry, robots place components onto circuit boards with a level of precision and speed that is unattainable by human hands. This capability is crucial for the production of smartphones, computers, and other electronic devices.
In the automotive manufacturing industry, pick and place robots are used for assembling parts into car bodies, installing seats, and mounting tires. Their ability to lift heavy loads and perform repetitive tasks tirelessly makes them ideal for such applications.
The robots' flexibility allows them to be reprogrammed for different tasks, making them a versatile tool in the manufacturing process. They can be equipped with various end effectors to handle different materials, from delicate electronic components to sturdy metal parts.
Food and Beverage Industry
The integration of pick and place robots, which have brought significant advancements in food handling, packaging, and quality control. These robots are designed to meet the stringent hygiene standards required in food processing, often constructed with materials that resist corrosion and are easy to clean.
In food production, pick and place robots are used for tasks such as sorting fruits and vegetables, placing chocolates into molds, and decorating cakes with high precision. They can gently handle food items which ensures that the products remain intact and presentable, which is crucial for maintaining quality and consumer appeal.
Other than picking, and sorting, these robots are capable of rapidly packing items into containers, trays, or wrapping materials. It increases throughput and extends the shelf life of products by minimizing human contact and potential contamination.

Robots in this sector are often equipped with advanced vision systems that enable them to identify and sort products based on size, color, or ripeness. This level of automation ensures consistency in product quality and helps in meeting the industry's high standards.
Moreover, due to their flexibility, they are ideal for quick changeovers between different products and packaging types. It is ideal for an industry that often requires the handling of a diverse range of items.
Pharmaceutical Industry
Pick-and-place robots have become an essential part of the pharmaceutical industry because of their safety and precision. These robots can maintain high levels of precision and cleanliness and are employed in various stages of pharmaceutical manufacturing and packaging. Typically, they handle sensitive materials and perform tasks that demand accuracy and consistency.
- Manufacturing - Used for precise placement of pills into trays or the filling of vials and syringes. Their ability to operate in sterile conditions without risk of contamination is crucial for maintaining the integrity of pharmaceutical products. The robots' precision is vital in ensuring that the correct dosage is dispensed, a critical factor in pharmaceutical production.
- Packaging - They can rapidly and accurately package pills into blister packs, place bottles into boxes, or arrange various products into their final packaging for shipment.
The robots used in the pharmaceutical industry are often equipped with specialized end effectors designed to handle delicate items. They may also incorporate advanced vision systems to verify the accuracy of the picking and placing process, ensuring that each product meets the stringent quality standards required in the industry.

Conclusion
Pick and place robots have become an integral part of many industries, revolutionizing processes and increasing efficiency. Their precision, speed, and reliability make them ideal for a variety of applications, from manufacturing to food and beverage production, and pharmaceuticals. The integration of advanced controllers and sensors has further enhanced their capabilities, allowing them to handle increasingly complex tasks with greater sensitivity and adaptability. As technology continues to advance, it is expected that pick-and-place robots will become even more sophisticated, driving further improvements in productivity, quality, and safety across a wide range of sectors.
FAQs
What is a pick and place robot?
A pick and place robot is a type of industrial robot that is designed to pick up items from one location and place them in another. They are used in a variety of industries, including manufacturing, food and beverage, and pharmaceuticals, to automate processes and increase efficiency.
What are the key components of a pick and place robot?
The key components of a pick and place robot include the robotic arm, end effector, controllers, and sensors. The robotic arm provides the movement, the end effector is the tool that interacts with the objects, the controllers execute the commands that drive the robot's movements, and the sensors provide feedback to ensure precise and accurate operations.
How are pick and place robots used in the manufacturing industry?
In the manufacturing industry, pick and place robots are used for tasks such as assembling electronic components and automotive parts. They increase production rates, reduce labor costs, and improve safety by taking over tasks that are dangerous or ergonomically unfavorable for human workers.
How are pick and place robots used in the food and beverage industry?
In the food and beverage industry, pick and place robots are used for tasks such as sorting fruits and vegetables, placing chocolates into molds, and packaging items into containers or trays. They improve efficiency, product quality, and food safety.
How are pick and place robots used in the pharmaceutical industry?
In the pharmaceutical industry, pick and place robots are used for tasks such as filling pills into trays or vials and packaging pharmaceuticals. They improve the efficiency, accuracy, and safety of drug manufacturing and packaging applications.
References
- Alison Marsh, (2022), "In 1961, the First Robot Arm Punched In", IEEE Spectrum
https://spectrum.ieee.org/unimation-robot - Gasparetto, Scalera, (2019), "From the Unimate to the Delta Robot: The Early Decades of Industrial Robotics: Proceedings of the 2018 HMM IFToMM Symposium on History of Machines and Mechanisms", ResearchGate
https://www.researchgate.net/publication/329590080 - What are pick and place robots and how do they work? | igus® Engineer's Toolbox
- The Benefits of Pick and Place Robots for Manufacturers | automate.org
- What is the Difference Between Cartesian and Gantry Robots? (robotsdoneright.com)
- What is a Pick and Place Robot: Types, Advantages and Applications (smlease.com)
- Most Common Types of Controllers in Robotics - Awe Robotics
Search for articles and topics on Wevolver
More by Cassiano Ferro Moraes
With five years of experience in the electrical engineering industry, Cassiano is a skilled technical writer who has a deep understanding of electronics and its applications across various industries. Cassiano has an excellent track record of developing high-quality, user-friendly technical document...

