Three Key Considerations for Selecting IMUs
Understanding IMU data sheets, manufacturers' testing methods, and the impact of environmental factors on performance.

Introduction
Industrial machinery, from robots to crane booms, require sensing and guidance to ensure their effective use. Beyond the industrial world, the latest video cameras detect and compensate for movement and vibration to create high-quality imagery. In fact, accurate sensing of orientation and movement is integral to everything from communication satellites to farming equipment.
Inertial measurement units (IMUs) allow the precise measurement of motion and orientation. When combined with accurate positioning information provided by global navigation satellite systems (GNSS), IMUs can provide location and velocity information, even when satellite signals are weak or obstructed.
Selecting the right IMU should be easy. Manufacturer’s data sheets provide access to all the information an engineer needs to choose the perfect component for their application. And yet, engineers are designing inaccuracy into their equipment as they are unable to gain a full understanding of how IMUs perform from data sheets alone.
In this paper, we will highlight three key challenges that engineers face when specifying an IMU for their next design. We will help them to read between the lines of the data sheet to understand the information they need. We will look at how manufacturers test their products, and we will explain how the environment can affect the performance of IMUs.
Chapter 1: Getting the Whole Picture
Engineers selecting the components for a new design will rely upon the manufacturer's information. The wealth of information provided by data sheets and catalogues allows the engineer to make decisions based on the component’s predicted performance. The key attributes that must be understood when selecting IMUs are bias instability and angle random walk (ARW). Bias instability is caused by tiny fluctuations in an IMU’s zero-bias level. This is the reading that the sensor delivers when it is at rest, and therefore provides the baseline for an IMU that is stationary. IMUs are affected by a range of external conditions, including variations in temperature and vibration, which reduce the accuracy and stability of the IMU's output. This change is characterized by a slow, long-term drift and is measured in degrees of drift per second (deg/s).
In contrast to bias instability, angle random walk is caused by random high-frequency noise inside the IMU which causes variations in the measurement of angular velocity over time. The errors that ARW tries to quantify grow with the square root of time, and so the accumulated angle error will grow over a long period.
Both attributes are, therefore, heavily influenced by time, a problem that is made worse by the dynamic conditions that IMUs are intended to measure. However, the data that is typically provided in IMU data sheets does not reflect this dynamic nature, and both bias instability and ARW are often published as a single number. This reduction of a complex system to a single number does not provide the engineer with a clear prediction of its performance over time. By relying on single attributes, engineers run the risk of designing inaccuracies into their device before it is even used.
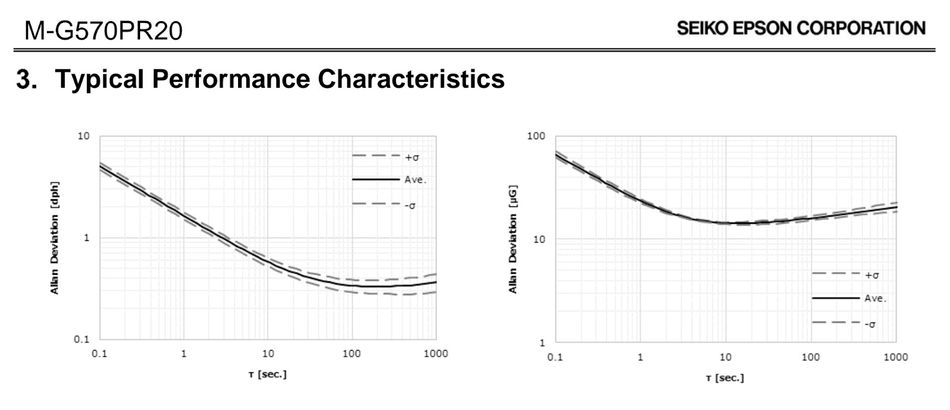
Instead of relying on the single value of the gyro bias instability and ARW, engineers can turn to Allan deviation plots. An Allan deviation plot (or Allan variance plot) is a graphical tool that provides a more useful understanding of the stability and noise characteristics of IMUs. The plot is unique to each IMU and helps identify the effects of different types of noise by showing how the variance of a sensor’s output changes over different averaging times. This is especially useful for assessing the drift and noise behaviour over time.
This time dependency is the key advantage of using Allan deviation instead of traditional standard deviation. Standard deviation is a useful tool if the mean of the data is expected to be constant, and the measurements do not drift over time. This is not the case with IMUs. An Allan plot is derived from data collected from the IMU over a period of time, calculated at an interval known as tau (𝜏). This represents the averaging time, and the higher the tau, the more that individual extreme readings will be averaged out.
The image below shows a typical Allan deviation plot for an IMU, in which the low point corresponds to the bias instability, whereas the value corresponding to tau of 1 sec (1 second averaging) represents the angular random walk, reflecting the higher frequency fluctuations that define ARW.
Another data point concerns warm-up time. Extreme temperatures can affect the warm-up time of the IMU. This is the period after activation that the IMU needs to reach its operational state. In just one example, after hours exposed to sub-zero temperatures, the warm-up time for an IMU may be considerably longer than published to allow the internal components to stabilize before they can provide accurate readings.
To avoid designing undesired inaccuracy into a new device, it is therefore vital for the engineers to access the best possible data. The preferred path for the engineer is to work with an IMU manufacturer that can provide this comprehensive information, for the alternative is for the engineer to conduct their own evaluation, a time-consuming process.
While the information presented in data sheets is important, the engineer will only gain a real insight into the performance of their chosen component by understanding the underlying data and how it will affect their application in the long run.
Chapter 2: IMUs in the Real World
Accurate and comprehensive information is therefore vital, but it is important for the engineer to understand the conditions under which it was obtained. Systems and equipment that use IMUs are regularly deployed beyond the safe environment of the laboratory into the real world. The conditions they encounter can have a significant effect on the performance of IMUs.
An example of these tough conditions can be found in modern farming. The agricultural industry is embracing the latest sensing technology, collecting data to maximize efficiency. This data is used to make decisions, from identifying optimum soil conditions to deploying the right resources.
Accurate positioning is essential for the smart farm. The ability to precisely control planting, fertilizing and harvesting activities allows the farmer to improve efficiency, yields, and sustainability. The huge growth in the development of autonomous tractors, harvesters, and drones places even more emphasis on navigation and positioning. These systems make use of global navigation satellite systems (GNSS) to allow these machines to operate within centimeters of their intended paths, without the need for human intervention.
However, GNSS signals may not always be available as satellite signals can become disrupted or blocked. Atmospheric conditions, interference from structures and geographical features, along with the orbital geometry of the satellites themselves can all cause loss of signals. Without satellite guidance, autonomous machinery cannot obtain the accurate position that is so important to precision farming.
Under these circumstances, the IMU becomes the principal means by which the equipment can locate their position. Using a process of dead reckoning, the IMU can measure the movement from the last known position provided by GNSS until the signal can be reacquired. The same method can be employed by a huge range of industries far from the smart farm, from the delivery of medical supplies by drone into remote locations to the automated loading of ships at ports.
This reliance on IMUs in the real world means that they must withstand a range of conditions. Some of the most important effects to consider are those caused by shock and vibration. IMUs can be affected by both high and low frequencies. Some frequencies can cause an effect called sensor saturation in which the IMU can no longer work correctly as the vibration exceeds the IMU’s limiting value. Engineers must also be aware of the physical damage that vibration and sudden shock can cause to equipment.
Engineers must also understand the effect of extreme temperatures on IMUs. In the earlier example, we looked at the need for accurate positioning on the smart farm. The agricultural environment is one of the harshest in the world, and vehicles are designed to function in an extraordinary range of conditions. Whether deployed to the frozen tundra in the Arctic circle or the unforgiving heat of deserts, equipment is exposed to ambient temperatures from -40°C to near the boiling point of water.
This range of temperatures has a significant impact on the accuracy and performance of IMUs. Bias instability changes with temperature, which can lead to cumulative errors, especially for measurements based on integration over time. To complicate matters further, the drift in bias caused by changes in temperature are often nonlinear. This means that the designer needs to calibrate their system over the expected operating temperature range to ensure accuracy.
Engineers must therefore understand the environment into which their equipment will be deployed. Identifying harsh conditions on the road or in the factory will allow engineer to choose the correct IMU based on accurate data. This may require information obtained from the IMU manufacture that is not contained in the data sheet. It is essential to understand how temperature will affect warm-up time, and to request a calibration profile that details temperature-dependent drifts.
Chapter 3: Consistency is the Key
While it is important for the engineer to understand the conditions to which their design will be exposed, it is also crucial to know how the data provided by the manufacturer was created. This has important implications for consistency. Data sheets for IMUs often present typical performance values, without providing clear information about how this information was obtained. In many cases, the published information is an average, but the data sheet will rarely provide details about the statistical methodology used to obtain the average. Without the all-important description of this typical performance, the engineer can only guess how the IMU will perform in their specific application.
When evaluating IMUs, it is important to understand the level of statistical confidence behind the performance data. Where some manufacturers will publish performance at a 1-sigma level, others will use 2-sigma. The statistical difference between different sigma levels has important implications for high-performance applications in which consistency is key.
Sigma levels are use used in statistics to describe a confidence level in the data provided. In a normal distribution of data, a 1-sigma (1σ) level represents one standard deviation away from the mean. At this level, roughly two-thirds (in fact, 68.27%) of the data values will fall within this one standard deviation from the mean. In real terms, it means that there is a two-thirds probability that any single measurement will fall within this range.
However, if a manufacturer bases their data on a 2-sigma (2σ) level, this probability rises to more than 95%. As a result, any one measurement will fall within the predicted range 19 times out of 20, delivering a far higher level of confidence in the data provided. In the context of IMUs, this confidence translates into an expectation of accuracy over time.
This variation in predicted consistency is further complicated by the testing regime employed by the manufacturer. Some manufacturers adopt a strategy of batch testing, evaluating only a small number of units to provide the data required. Other manufacturers may conduct multiple tests on a single unit in the expectation that this will provide an accurate prediction of the performance of the entire range. The result is that the listed performance may not accurately reflect the variability between different IMUs from the same production batch. This variability can be significant, particularly for critical characteristics like bias instability.
Unfortunately, the only way to truly understand how an IMU will perform in a real-world application is for the engineer to perform their own evaluation. While data sheets can provide a baseline, real-world testing is necessary to understand the variability between units and ensure consistent performance in the field. Working with a trusted manufacturer that publishes clear and comprehensive information can go a long way to helping the engineer with their understanding.
Conclusion
Selecting the right inertial measurement unit is a complex task. Not only are IMUs required to accurately measure movement, but they are expected to deliver high reliability in some of the most demanding conditions..
Engineers need to understand how these conditions will affect the performance of their IMU. The roles played by extremes of temperature and the physical demands of dynamic applications must be considered before the engineer can have confidence on their design. Unfortunately, some manufacturers do not provide easy access to the detailed information that engineers need. Therefore, when selecting an IMU, here are the key considerations for engineers:
- Remember that the data sheet might not contain the depth of information required. Do not rely on single-number attributes, and obtain Allan deviation plots to gain a full understanding of the device’s performance.
- Device testing takes place in the controlled environment of the laboratory, but the real-world is not so accommodating. Extremes of temperature and physical demands play a huge role in the reliability and accuracy of IMUs. Engineers should ensure that they understand their environment.
- Take the time to understand how IMUs are tested. Confidence in performance comes from extensive testing methods, and clearly published data from the manufacturer. If necessary, engineers should be ready to conduct their own evaluation.
Epson manufactures a comprehensive range of IMUs for a huge array of applications, from earthquake detection to the precise positioning of satellites in space. Epson creates highly capable sensing systems that offer outstanding precision, high stability, and low noise to deliver confidence to design engineers in the most demanding industries.