Robots with CLAWS
Texas A&M researchers transform how robots traverse challenging terrain.
27 Nov, 2024.

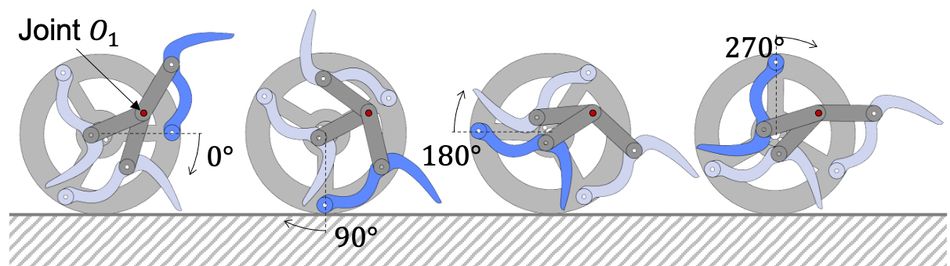
Inspired by airplane propellers, Yuan Wei proposed the initial idea which became the CLAW. | Image: Courtesy of Dr. Kiju Lee.
This article was first published on
engineering.tamu.eduThe Cycloidal-Augmented Wheel (CLAW) is the latest innovation from the Adaptive Robotics and Technology Lab in the Department of Engineering Technology and Industrial Distribution. This novel mechanism allows a robot to maintain smooth wheeled motion on flat landscapes and seamlessly transition to a climbing motion to overcome obstacles. The wheel’s claw-like components extend to reach heights and retract when approaching the ground, allowing continuous contact with the surface.
The CLAW was invented by Dr. Kiju Lee, an associate professor in the Department of Engineering Technology and Industrial Distribution and J. Mike Walker ’66 Department of Mechanical Engineering, with mechanical engineering Ph.D. student Yuan Wei. As part of a 2020-2021 DARPA-funded project, Lee’s research team created the Adaptable Wheel-and-Leg Transformable Robot (a-WaLTR). Unlike a-WaLTR, which switches between wheels and legs, the CLAW mechanism can be retrofitted on track robots or conventional wheeled robots.
Funded by the USDA National Institute of Food and Agriculture through the National Robotics Initiative 3.0 program, the project first focused on creating a scalable and adaptive swarm of robots for diverse agriculture environments. With the addition of the CLAW, these robots can manage an agricultural field’s varying topography and changing weather conditions. The design may also broaden the application of robots in search and rescue, disaster response, and military operations. Wei’s parents, who are physicians, even see its potential use in wheelchairs.
To test the CLAW, Lee and Wei constructed CLAWbot, a fixed-axis, four-wheeled robot fitted with the new design. The robot demonstrated multi-terrain mobility and reliable climbing of obstacles and stairs. CLAWbot leverages existing research on wheeled robot control, localization, and navigation, which provides a solid foundation for developing self-operating abilities.

The design was recently published in the IEEE/ASME Transactions on Mechatronics and the project has a provisional patent.
“Design-driven innovation is the core inspiration of the Adaptive Robotics and Technology Lab. The CLAW mechanism exemplifies how novel mechanical design can solve the complex challenge of achieving versatile, multi-terrain mobility in mobile robots,” states Lee.