Featured
Understanding the device physics, trade-offs, and design guidance for power electronics
Understanding the device physics, trade-offs, and design guidance for power electronics
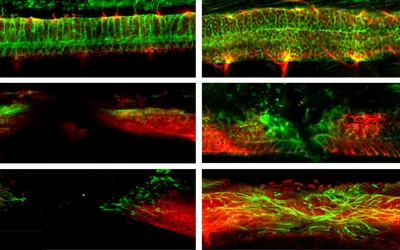
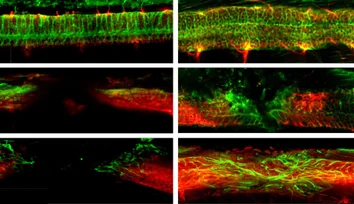
EPFL researchers are developing AI models that could one day enable vision prosthetics able to restore meaningful, object-level sight for the blind.
From simple sensor control to connected, intelligent devices, embedded systems often outgrow a single MCU. Pairing an MCU with Linux adds power and flexibility, but also introduces communication challenges, dual development workflows, and increasing software complexity.
This comprehensive article dives deep into the world of robotics, exploring the history, types, engineering components, applications, and future trends of robots, offering readers an in-depth understanding of how these remarkable machines work and shape our lives.
13 minutes read.
11 minutes read.
16 minutes read.
20 minutes read.
16 minutes read.
14 minutes read.



University
At the Harvard John A. Paulson School of Engineering and Applied Sciences (...
42 Posts

Robotics & Automation
READY Robotics is a robotics software company that vastly simplifies robot ...
24 Posts

Automation Machinery Manufacturing
We are a company in flying robotics, specializing in Non-destructive inspec...
23 Posts
Everyone, guess how fast is it?
The new design could assist the elderly as they age in place at home.
The hospitality industry can leverage the gender characteristics of service robots to influence customers' decisions, according to new research from a team in the Penn State School of Hospitality Management.
Service robots have evolved from simple automated machines to intelligent adaptive systems that can navigate unpredictable environments and interact with humans.
Engineers at Princeton and North Carolina State University have combined ancient paper folding and modern materials science to create a soft robot that bends and twists through mazes with ease.
A research team from ETH Zurich and the University of Zurich (UZH) has developed a novel approach to treating spinal cord injuries: controllable microrobots deliver stem cells directly to the site of an injury, where they promote nerve cell regeneration.
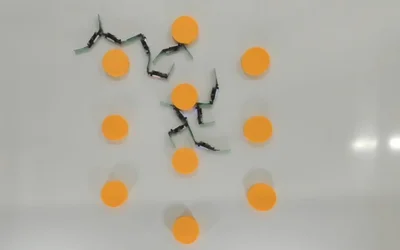
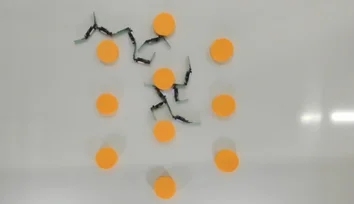
Cornell engineers have developed a robotic collective that behaves less like a machine and more like a material that flows, reshapes and adapts to its environment without centralized control.
From hospital wards to crop fields, from microscopic swarms to biohybrid machines powered by fungi, robotics research at Cornell spans an astonishing range of scale, application and ambition.
Understanding the device physics, trade-offs, and design guidance for power electronics
EPFL researchers are developing AI models that could one day enable vision prosthetics able to restore meaningful, object-level sight for the blind.
From simple sensor control to connected, intelligent devices, embedded systems often outgrow a single MCU. Pairing an MCU with Linux adds power and flexibility, but also introduces communication challenges, dual development workflows, and increasing software complexity.

4 minutes read
Engineers at Princeton and North Carolina State University have combined ancient paper folding and modern materials science to create a soft robot that bends and twists through mazes with ease.
A deep-dive listicle guiding controls, automation, and quality engineers toward the best vision systems for manufacturing applications in 2026.
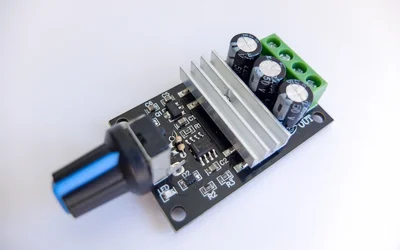
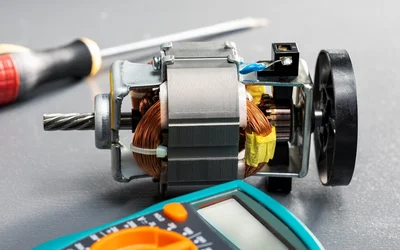
This article explains practical DC motor speed control techniques for both brushed and BLDC systems, covering design principles, control methods, and engineering considerations behind reliable motor speed control.
Mario Mauerer, maxon's Global Business Development Manager, Robotics, discusses what it takes for robotic deployments to be successful in complex real-world environments.
A crystal oscillator is an electronic circuit that uses a quartz crystal to produce a precise and stable frequency reference. This article covers crystal operation, equivalent circuit models, resonance, load capacitance, oscillator topologies, stability, aging, and design practices.
A research team from ETH Zurich and the University of Zurich (UZH) has developed a novel approach to treating spinal cord injuries: controllable microrobots deliver stem cells directly to the site of an injury, where they promote nerve cell regeneration.
Understanding industrial vision systems by examining their components, imaging fundamentals, AI integration since 2020, and how to choose the right solution for every application.
Nexperia links device-level advantages to application requirements, helping designers choose the best Wide bandgap (WBG) solution for their design.
This article presents an end-to-end motor control design methodology covering mechanical sizing, power electronics, sensor selection, real-time control algorithms, EMC, and functional safety for engineers building motor drives.
Cornell engineers have developed a robotic collective that behaves less like a machine and more like a material that flows, reshapes and adapts to its environment without centralized control.
The robotics industry is moving quickly, with innovation expanding across manufacturing, healthcare, logistics, and automation.

3 minutes read
This article is a practical guide to motor speed control, covering PWM duty control, VFDs, scalar control, vector control, and field-oriented control for DC, BLDC, induction, PMSM, stepper, and servo motor systems.