It's all in the wrist: energy-efficient robot hand learns how not to drop the ball
Researchers have designed a low-cost, energy-efficient robotic hand that can grasp a range of objects – and not drop them – using just the movement of its wrist and the feeling in its ‘skin’.

17 May, 2023. 4 minutes read
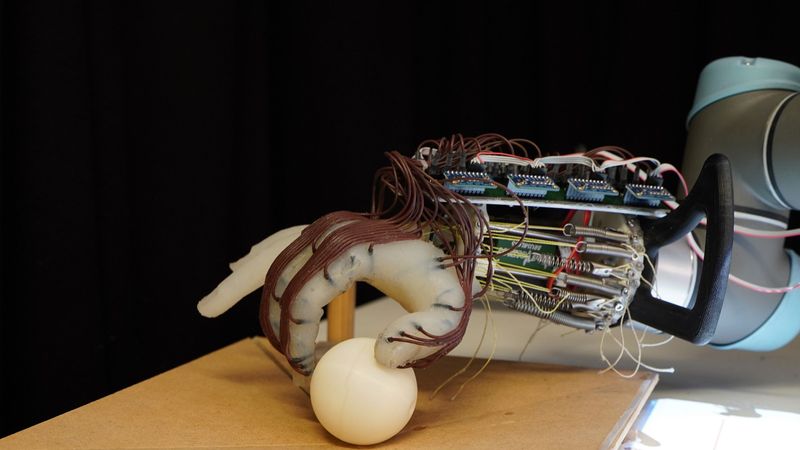
Grasping objects of different sizes, shapes and textures is a problem that is easy for a human, but challenging for a robot. Researchers from the University of Cambridge designed a soft, 3D printed robotic hand that cannot independently move its fingers but can still carry out a range of complex movements.
The robot hand was trained to grasp different objects and was able to predict whether it would drop them by using the information provided from sensors placed on its ‘skin’.
This type of passive movement makes the robot far easier to control and far more energy-efficient than robots with fully motorised fingers. The researchers say their adaptable design could be used in the development of low-cost robots that are capable of more natural movement and can learn to grasp a wide range of objects. The results are reported in the journal Advanced Intelligent Systems.
In the natural world, movement results from the interplay between the brain and the body: this enables people and animals to move in complex ways without expending unnecessary amounts of energy. Over the past several years, soft components have begun to be integrated into robotics design thanks to advances in 3D printing techniques, which have allowed researchers to add complexity to simple, energy-efficient systems.
The human hand is highly complex, and recreating all of its dexterity and adaptability in a robot is a massive research challenge. Most of today’s advanced robots are not capable of manipulation tasks that small children can perform with ease. For example, humans instinctively know how much force to use when picking up an egg, but for a robot this is a challenge: too much force, and the egg could shatter; too little, and the robot could drop it. In addition, a fully actuated robot hand, with motors for each joint in each finger, requires a significant amount of energy.
In Professor Fumiya Iida’s Bio-Inspired Robotics Laboratory in Cambridge’s Department of Engineering, researchers have been developing potential solutions to both problems: a robot hand than can grasp a variety of objects with the correct amount of pressure while using a minimal amount of energy.
“In earlier experiments, our lab has shown that it’s possible to get a significant range of motion in a robot hand just by moving the wrist,” said co-author Dr Thomas George-Thuruthel, who is now based at University College London (UCL) East. “We wanted to see whether a robot hand based on passive movement could not only grasp objects, but would be able to predict whether it was going to drop the objects or not, and adapt accordingly.”
The researchers used a 3D-printed anthropomorphic hand implanted with tactile sensors, so that the hand could sense what it was touching. The hand was only capable of passive, wrist-based movement.
The team carried out more than 1,200 tests with the robot hand, observing its ability to grasp small objects without dropping them. The robot was initially trained using small 3D printed plastic balls, and grasped them using a pre-defined action obtained through human demonstrations.
“This kind of hand has a bit of springiness to it: it can pick things up by itself without any actuation of the fingers,” said first author Dr Kieran Gilday, who is now based at EPFL in Lausanne, Switzerland. “The tactile sensors give the robot a sense of how well the grip is going, so it knows when it’s starting to slip. This helps it to predict when things will fail.”
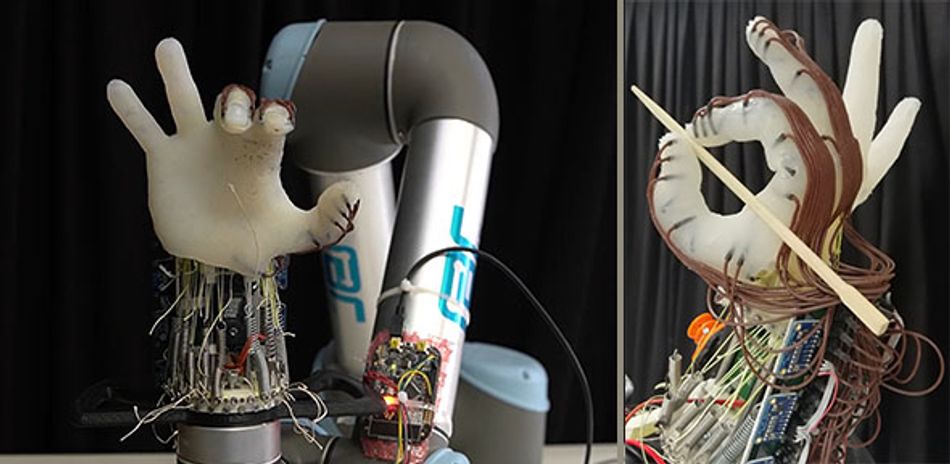
The robot used trial and error to learn what kind of grip would be successful. After finishing the training with the balls, it then attempted to grasp different objects including a peach, a computer mouse and a roll of bubble wrap. In these tests, the hand was able to successfully grasp 11 of 14 objects.
“The sensors, which are sort of like the robot’s skin, measure the pressure being applied to the object,” said Dr George-Thuruthel. “We can’t say exactly what information the robot is getting, but it can theoretically estimate where the object has been grasped and with how much force.”
“The robot learns that a combination of a particular motion and a particular set of sensor data will lead to failure, which makes it a customisable solution,” said Dr Gilday. “The hand is very simple, but it can pick up a lot of objects with the same strategy.”
“The big advantage of this design is the range of motion we can get without using any actuators,” said Professor Iida. “We want to simplify the hand as much as possible. We can get lots of good information and a high degree of control without any actuators, so that when we do add them, we’ll get more complex behaviour in a more efficient package.”
A fully actuated robotic hand, in addition to the amount of energy it requires, is also a complex control problem. The passive design of the Cambridge-designed hand, using a small number of sensors, is easier to control, provides a wide range of motion, and streamlines the learning process.
In future, the system could be expanded in several ways, such as by adding computer vision capabilities, or teaching the robot to exploit its environment, which would enable it to grasp a wider range of objects.
Reference:
K. Gilday, Dr. T. George-Thuruthel, Prof. F. Iida. ‘Predictive Learning of Error Recovery with a Sensorised Passivity-based Soft Anthropomorphic Hand.’ Advanced Intelligent Systems (2023). 10.1002/aisy.202200390