BLEEX
The anthropomorphically-based BLEEX has seven degrees of freedom per leg, four of which are powered by linear hydraulic actuators. The exoskeleton is worn by its operator and provides its wearer the ability to carry significant loads on his/her back with minimal effort over any type of terrain. BLEEX has two powered anthropomorphic legs, a power supply, and a backpack-like frame on which a variety of heavy payloads can be mounted. BLEEX provides load carrying capability through legged locomotion guided by human interaction, but instead of actively “driving” the vehicle, BLEEX shadows the operator’s movement as he/she “wears” it like a pair of artificial legs













Technical Specifications
| Walking speed | 1.3 |
| Supports | 75 |
| Actuators | |
| Joint cylinders | bore, double-acting linear piston-cylinders |
| Degrees of freedom (DOF) | |
| Hip | 3 |
| Knee | 1 |
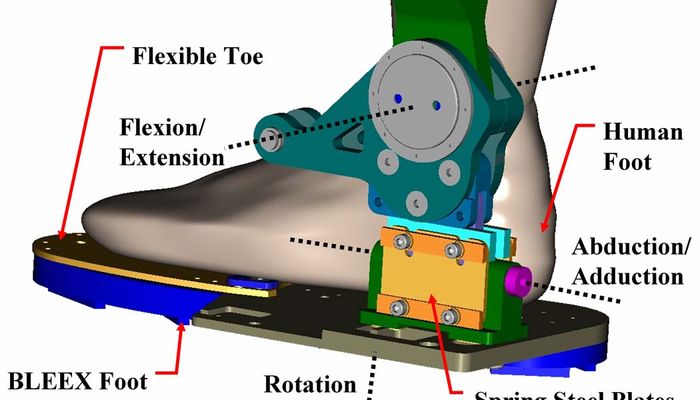
| Ankle | 3 |
Overview
The anthropomorphically-based BLEEX has seven degrees of freedom per leg, four of which are powered by linear hydraulic actuators.
The exoskeleton is worn by its operator and provides its wearer the ability to carry significant loads on his/her back with minimal effort over any type of terrain. BLEEX has two powered anthropomorphic legs, a power supply, and a backpack-like frame on which a variety of heavy payloads can be mounted.
BLEEX provides load carrying capability through legged locomotion guided by human interaction, but instead of actively “driving” the vehicle, BLEEX shadows the operator’s movement as he/she “wears” it like a pair of artificial legs.
The exoskeleton control algorithm makes sure that the exoskeleton mirrors the operator with minimal interaction forces between the two. The control scheme needs no direct measurements from the operator or where the operator contacts the exoskeleton. Instead, the controller estimates, based on measurements from the exoskeleton only, how to move such that the pilot feels very little force.
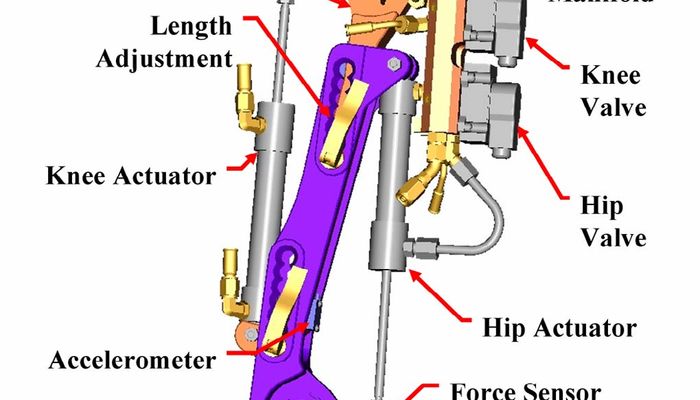
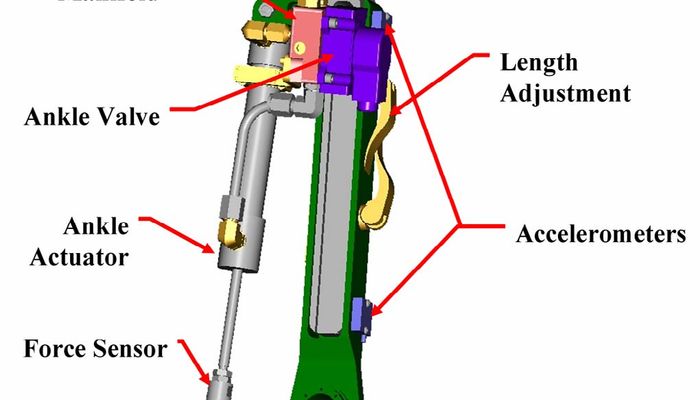
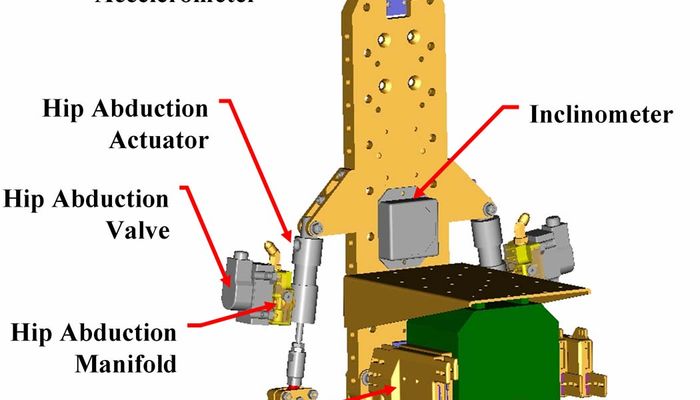
For BLEEX, the ankle, knee, and hip flexion/extension joints require an average of 1.3 kW of hydraulic power to walk. An additional 540 W of hydraulic power is necessary for maneuvers other than walking and for the hip abduction/adduction actuators. 4-way, double-stage servo valves were selected to control the actuators due to their high bandwidth, high flow rates, and low electrical power requirements. These valves require approximately 28 W of hydraulic power each, so the eight valves consume 224 W total. The total hydraulic power requirement for the 75 kg BLEEX (and payload) to walk at 1.3 m/s is approximately 2.27 kW, or 3.0 hp (including a 10% safety factor).
References
An overview of one of the control schemes. The analysis is an extension of the classical definition of the sensitivity function of a system: the ability of a system to reject disturbances or the measure of system robustness.
Describes an improved control scheme called “mixed” control that adds robustness to changing BLEEX backpack payload.
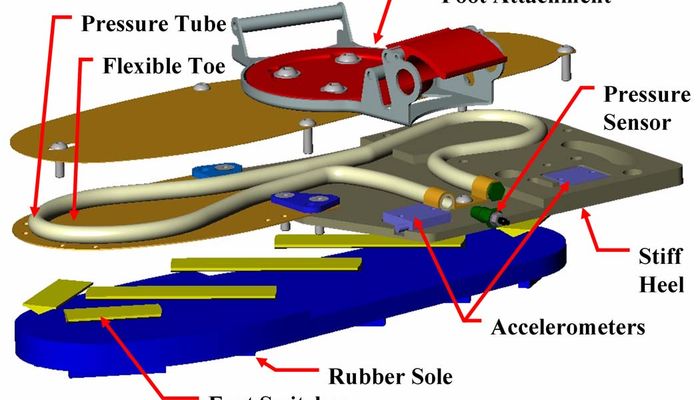
Summarizes the mechanical design of the Berkeley Lower Extremity Exoskeleton (BLEEX). Describes the background, design architecture, foot, joint, and torso design.
Recommended Specs



Continue Reading

Director of Installation and Maintenance for VodafoneZiggo, Nicole Hoebink lives “happily” in Den Bosch with her husband and her 14-year-old son. Walking their dogs is one of her favorite activities to relax and clear up her mind. Nicole has a background in economics.

5 minutes read


Designed by Columbia Engineers, RoSE is first device to measure 3D stiffness of human torso, could lead to new treatments for children with spine deformities such as idiopathic scoliosis and kyphosis


Alexey Ledyukov, a student at ITMO’s Faculty of Control Systems and Robotics, has designed an exoskeleton that will be able to help lift up to 80 kilograms easily. At the same time, the suit itself doesn’t weigh much: you can move and even run in it freely.

5 minutes read
