Clutch spring knee exoskeleton
An exoskeleton that reduces joint loading, muscle fatigue, or metabolic demand of walking. This is an exoskeletal architecture for augmenting running leveraging a spring–clutch exoskeleton consisting of a custom interference clutch with an integrated planetary gearbox. Specifications for the exoskeletal joint were derived from existing biomechanical data. The design also includes a control system to enable clutch locking and unlocking throughout a running gait cycle.













Technical Specifications
| Mass | 710 |
| Diameter | 85 |
| Thickness | 49 |
| Holding torque | 190 |
| Radial load | 4780 |
| Axial load | 4050 |
| Engagement time | 28.6 |
| Resolution | 1.8 |
| Range of motion | 30 |
| Battery | 2000 |
| Processor | 1 |
| Sensors | 1 |
| 1 | |
| 1 | |
| Data storage |
Overview
This is an exoskeletal architecture for augmenting running leveraging a spring–clutch exoskeleton consisting of a custom interference clutch with an integrated planetary gearbox.
Specifications for the exoskeletal joint were derived from existing biomechanical data. The design also includes a control system to enable clutch locking and unlocking throughout a running gait cycle.
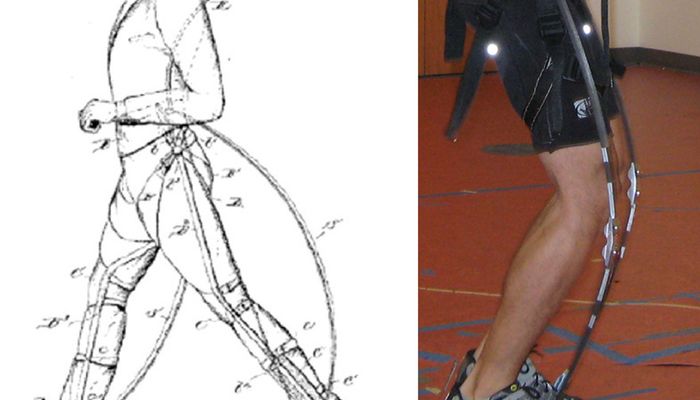
The elastic element of the exoskeleton consists of thin strips of semirigid unidirectional “E” fiberglass laminate located proximal and distal to the lockable exoskeletal joint. The net system constitutes a compression spring, characterized by the geometry of these elastic elements.
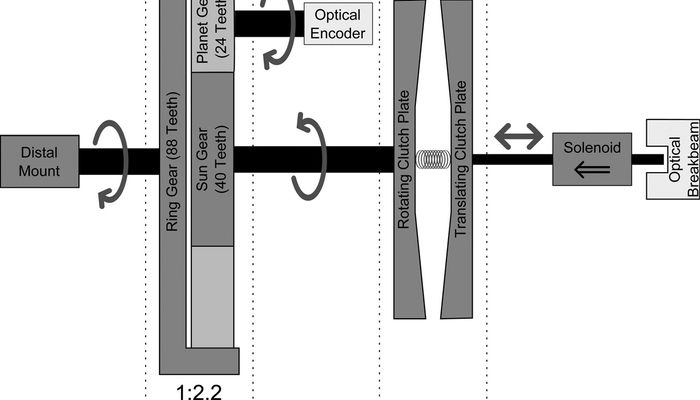
The exoskeletal joint consists of an interference clutch (chosen for its high ratio of holding torque to mass) in series with a planetary gearbox which decreases the load on the clutch plates and increases effective resolution, compensating for the discretized engagement of the interference clutch.
Electronics are housed in a lateral subassembly with only a single pair of wires necessary to connect to the solenoid. A quadrature phase encoder for measuring the exoskeletal joint angle and a break beam for measuring solenoid position are both interfaced optically. The sensor suite is completed by a three-degrees of freedom sagittal plane inertial measurement unit.
References
Introduces the project and its motivation. Describes the elastic element design, clutched exoskeletal joint, and electrical systems. Discusses the results of the research and mechanical validation.
Paper investigates the hypothesis that the addition of an external elastic element at the knee during the stance phase of running results in a reduction in knee extensor activation so that total joint quasistiffness is maintained.
Describes the design of two elastic leg exoskeletons that act in parallel with the wearer’s legs. Tests hypotheses by measuring GRFs, exoskeletal compressions, and metabolic rates.
Recommended Specs



Continue Reading

Director of Installation and Maintenance for VodafoneZiggo, Nicole Hoebink lives “happily” in Den Bosch with her husband and her 14-year-old son. Walking their dogs is one of her favorite activities to relax and clear up her mind. Nicole has a background in economics.

5 minutes read


Designed by Columbia Engineers, RoSE is first device to measure 3D stiffness of human torso, could lead to new treatments for children with spine deformities such as idiopathic scoliosis and kyphosis


Alexey Ledyukov, a student at ITMO’s Faculty of Control Systems and Robotics, has designed an exoskeleton that will be able to help lift up to 80 kilograms easily. At the same time, the suit itself doesn’t weigh much: you can move and even run in it freely.

5 minutes read
