Dual-Axis Tilting Quadcopter
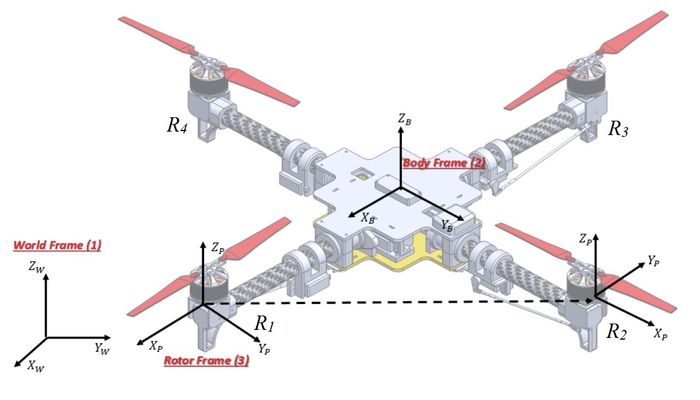
An actuation concept to enhance the performance characteristics of the conventional under-actuated quadcopter. This actuation strategy has been developed in order to increase the agility and control bandwidth of conventional quadcopters in outdoor scenarios. The introduction of dual-axis tilting to the propellers produces an over-actuated quadcopter with the ability to have 12 control inputs with 6 control outputs. The tilting of propellers provides the necessary gyroscopic effects to provide fast control and action. The proposed tilting rotor solution for quadcopter uses additional 8 servo motors that allow the rotors to tilt in both axes, an over-actuated system can potentially track an arbitrary trajectory over time.










Technical Specifications
| UAV Dimensions | 1048 |
| Weight | 4 |
| Endurance | 20 |
| Payload Capacity | 2 |
| Servomotors | 8 |
| Rotor motors | 4 |
| Propellors | 4 |
| RC Controller | |
| Microcontroller | |
| Flight Control | |
| Manufacturing | |
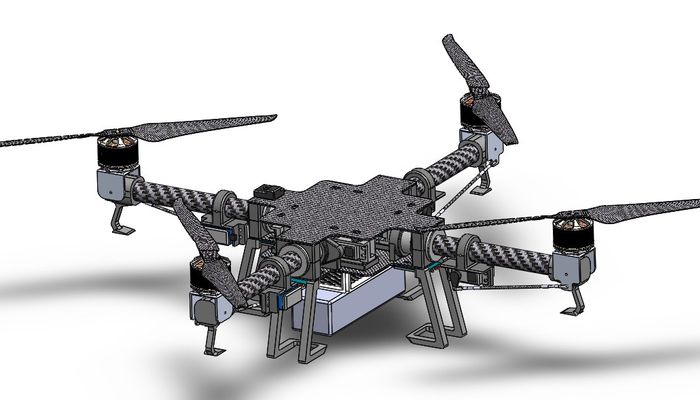
| CAD design |
Overview
This actuation strategy has been developed in order to increase the agility and control bandwidth of conventional quadcopters in outdoor scenarios.
The introduction of dual-axis tilting to the propellers produces an over-actuated quadcopter with the ability to have 12 control inputs with 6 control outputs. The tilting of propellers provides the necessary gyroscopic effects to provide fast control and action. The proposed tilting rotor solution for quadcopter uses additional 8 servo motors that allow the rotors to tilt in both axes, an over-actuated system can potentially track an arbitrary trajectory over time.
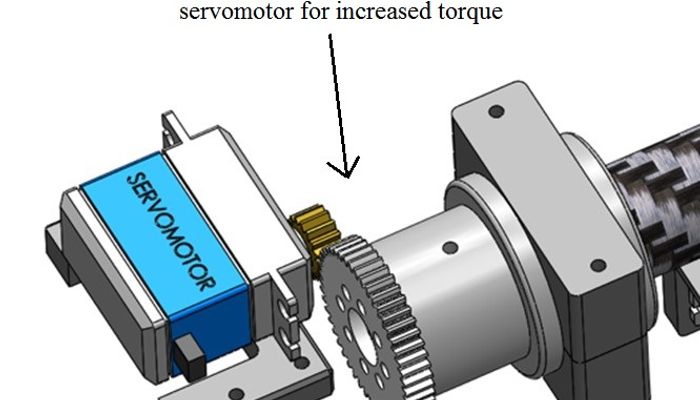
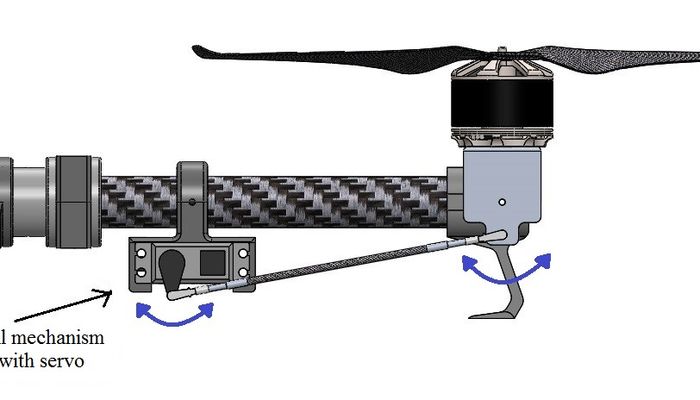
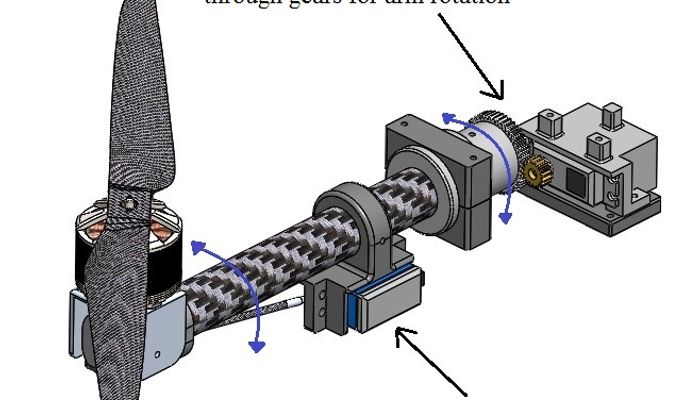
The development of this concept is mainly based on the arm design of the quadcopter in which each arm is able to generate three-actuation independently, including the rotors to achieve differential thrusting and dual tilting mechanism to provide a broad range of control bandwidth.
References
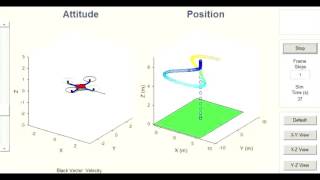
Describes the design, modeling, simulation, and prototyping of the dual-axis tilting quadcopter. Also shows outdoor flight tests.
Recommended Specs



Continue Reading

Civil engineers observe how flocks of animals avoid collisions to help devise safe, self-regulated systems for drones and driverless cars.

2 minutes read


The intersection of drones and wearables is opening the doors to the market of fitness drones


University of Aberdeen has partnered with Duke University to develop a UAV system capable of studying bottlenose dolphins to determine how environmental changes impact the populations
