JACO robotic arm
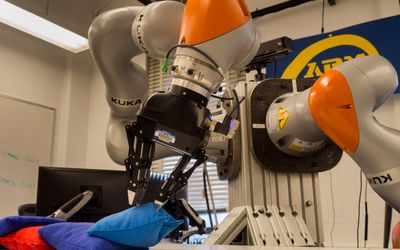
The JACO arm is a light-weight, technical assistance robot which was designed to compensate for the loss of arm movements. It is composed of six interlinked segments, the last of which is a three-fingered hand. Through the controller, the user can move the robot’s hand in three-dimensional space and grasp or release objects with the hand, using either two or three fingers. An adapted controller is used to switch between modes of control. The robotic arm JACO can be fixed to a powered wheelchair, a workstation and toa table. JACO fits entirely under the armrest of a wheelchair and does not extend the width of the chair. The JACO arm is able to increase the performance of activities of daily living in individuals with physical disabilities, without adding barriers to wheelchair mobility.
Technical Specifications
| Wrist angle | 60 |
| Weight | 5.2 |
| Payload | 1.6 |
| Reach | 900 |
| Power consumption | 25 |
| Actuators | |
| Degrees of freedom | 4 or 6 |
| Sensors in the base of the arm | |
| Sensors in each actuator | |
| Sensors in each fingers | |
| Grip force | 25 - 40 |
Overview
The JACO arm is a light-weight, technical assistance robot which was designed to compensate for the loss of arm movements. It is composed of six interlinked segments, the last of which is a three-fingered hand. Through the controller, the user can move the robot’s hand in three-dimensional space and grasp or release objects with the hand, using either two or three fingers. An adapted controller is used to switch between modes of control.
The robotic arm JACO can be fixed to a powered wheelchair, a workstation and toa table. JACO fits entirely under the armrest of a wheelchair and does not extend the width of the chair. The JACO arm is able to increase the performance of activities of daily living in individuals with physical disabilities, without adding barriers to wheelchair mobility.
Actuators
The actuators use DC brushless motors with Harmonic Drive technology and are equipped with
a set of sensors such as encoders, torque sensor, current sensor, temperature sensor and accelerometers. They can be controlled in position or torque and can perform multiple rotations thanks to an integrated slip ring technology. The actuators are independent, interoperable and can be used to build custom robots or system.
Grippers
The gripper must be able to pick objects of daily living, both varying in shape and size. Underactuated grippers (Birglen et al., 2008), with one motor per finger, are designed to simplify the controller, to reduce costs and to automatically adapt to the shape of different objects. The grippers include a 2-finger and a 3-fingers hand.
Interface
Different interfaces can be used to control the robots such as a Software Development Kit (SDK) (including a high-level API, a low-level API and a Development center), a ROS package and a Joystick. The joystick enables the user to quickly operate the robot. It has a three degrees of freedom stick
and 7 buttons. The basic mapping allows performing translations, rotations and moving the fingers.
References
Describes Kinova’s hardware platforms, the different control modes (position, velocity and torque), control features and possible control interfaces. Integration to other systems and application examples are also presented.
Contains general description, components, specifications, and joystick controls.
Official ROS packages for the Kinova robotic arms.
Recommended Specs



Continue Reading
It’s one thing for a robot to sort through a pile of rigid objects like blocks, but what about softer stuff?

2 min read


After the introduction of radiotherapy, the use of metallic knives in the field of tumor treatment decreased. Now the knife has been experiencing a revival for several years. Yet, the knife in question is not a physical instrument, but a virtual one.

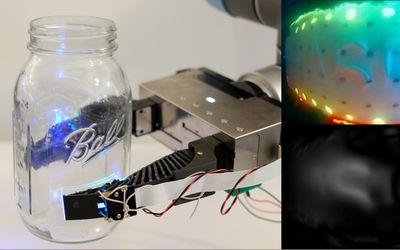
In a recent project, Professor Edward Adelson and Sandra Liu — a mechanical engineering PhD student at CSAIL — have developed a robotic gripper using novel “GelSight Fin Ray” fingers that, like the human hand, is supple enough to manipulate objects.
