Behavioral Measures For Cable-Driven Parallel Robots In The Industrial Environment
French manufacturing companies exist in a constantly changing economic sector. In order to better respond to their customers’ requirements and market pressures, they have to demonstrate innovation and a readiness to invest in factory modernization.
02 Jul, 2021. 3 minutes read
French manufacturing companies exist in a constantly changing economic sector. In order to better respond to their customers’ requirements and market pressures, they have to demonstrate innovation and a readiness to invest in factory modernization. However, it is not always possible to make major investments in research and development, particularly for SMEs. It is within this context that technological research institutes were launched in 2012, to contribute to improving the competitive position of strategic industrial sectors in France. One such technological research institute, IRT Jules Verne, has been established in Nantes.
IRT Jules Verne is a mutualized industrial research center working with a number of French industrial partners. The work undertaken by IRT Jules Verne, the only technological research institute dedicated to manufacturing in France, deals with industrial research whose objectives are to accelerate innovation and technology transfer to factories. In proposing technological revolutions on manufacturing procedures, IRT Jules Verne takes a collaborative approach in order to address the market challenges of industrial sectors.
Performance study – cable-driven parallel robot
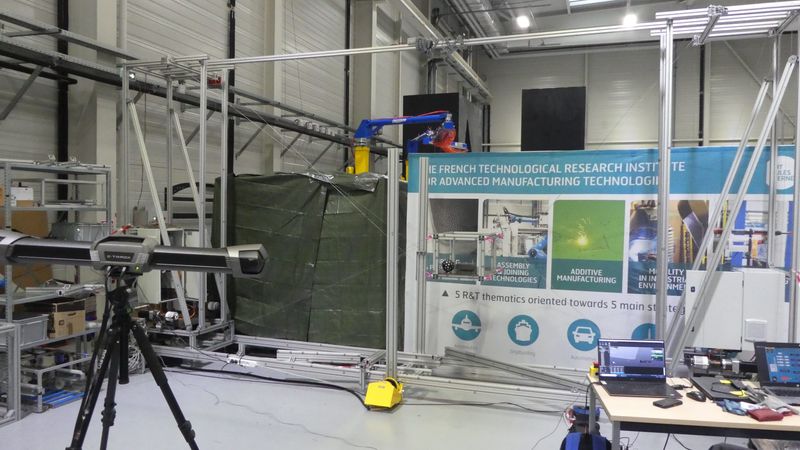
IRT Jules Verne has recently developed a new robot, which belongs to the category of cable-driven parallel robots. These are robots that move their effector/work tool by means of 4 to 8 cables connected to a fixed support. A relatively rare technology outside research laboratories, the use of these robots in an industrial environment has yet to be demonstrated. To perform this demonstration, a team of researchers from IRT had to test a prototype.
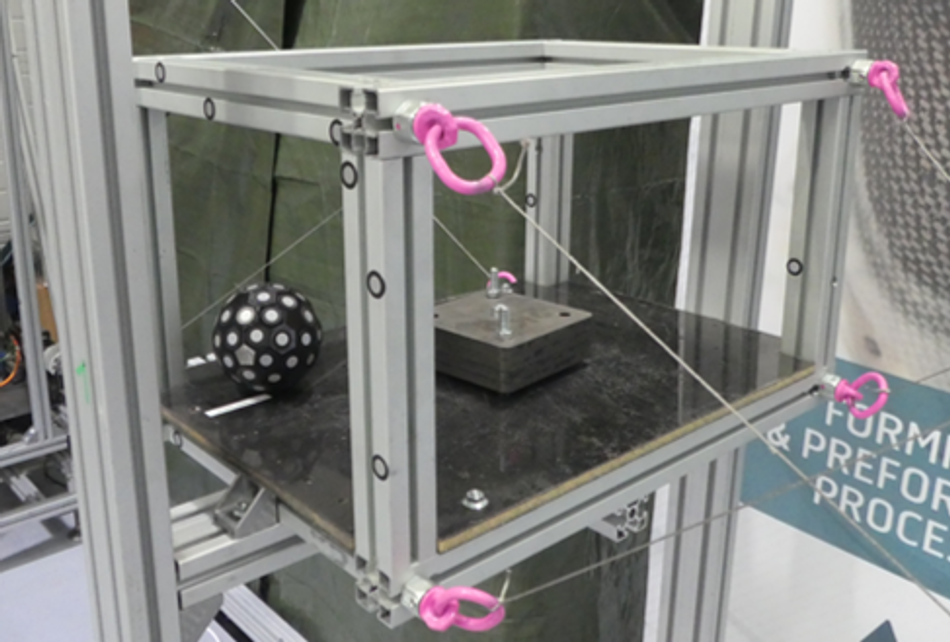 Cable-driven parallel robot effector
Cable-driven parallel robot effector 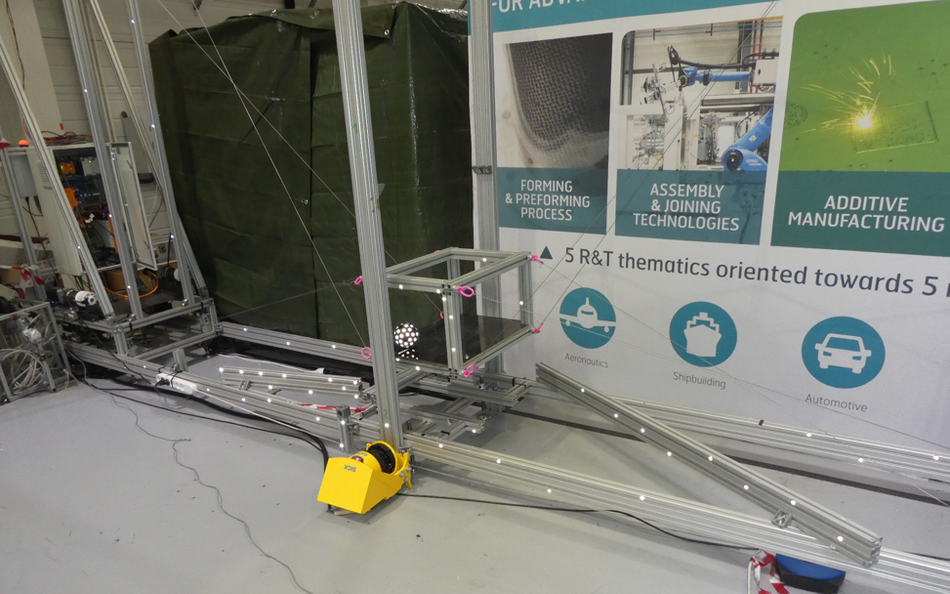
Unlike the conventional shelf robot, it was impossible for the researchers to consult technical specifications to understand their repeatability. This type of information had to be specified through testing and an in-depth study of robot performance. The IRT team therefore began searching for a reliable measuring tool to enable them to accurately measure the robot’s behavior and to estimate its repeatability with pinpoint accuracy, as well as its drifting over time.
Requirements of flexibility and precision
To complete this project satisfactorily, the researchers had to find a metrological solution that offered superior levels of flexibility, accuracy and efficiency. As the tests had to be conducted in the IRT’s technology center, considerations such as simplicity and cost were also of paramount importance.
Early on, tests have been conducted with a high-end virtual reality system. However, as the equipment was not designed specifically for this type of use, it was not capable of providing a sufficiently valid measure to be used as ground truth. Other avenues were also explored, such as using a laser tracker system. Although measurement speed and accuracy were adequate, the cost and complexity of using this system were incompatible with this research project.

In search of the ideal solution
The researchers at IRT finally decided on the C-Track system from Creaform, because of its sub-millimeter measurement precision and affordable price. With a measurement frequency of up to 6600 3D points per second and a measure of volume from 9.1 to 16.6 m3, this technology was clearly the ideal solution for this project. Furthermore, the potential to be able to move the C-Track without having to recalibrate everything turned out to be a distinct advantage. This Creaform product enabled researchers to obtain ground truth and measure the position of the robot effector throughout its entire workload.
Nicolò Pedemonte, R&D Robotics Engineer at IRT Jules Verne, confirmed that the whole team is very satisfied with these initial results of experimental validation and use of the C-Track as a whole. “Although it is difficult to accurately specify the savings we have managed to achieve, it is interesting to note that we can estimate a time saving of up to 50%,” he confirmed, before adding, “if we had used another measuring system, the cost in terms of time and money would have been prohibitive”.