Dexterous Robotic Hands Part 2: How the Shadow Dexterous Hand is Revolutionizing Robotics
Part 2 of our dexterous robotic hand series.

25 Sep, 2023. 10 minutes read
In Part 2 of our series we provide a deeper look at the Shadow Robot Dexterous Hand, including its product line, the technology used to build the hand, and how the hand can be customized and integrated with systems, sensors, and controls. We will also highlight case studies that show how the Shadow Hand has been used by organizations such as OpenAI, Google, and Bielefeld University to advance a comprehensive understanding of the hand’s capabilities and potential applications.
Introduction
The Shadow Robot Dexterous Hand is an advanced robotic hand designed to replicate the dexterity and flexibility of the human hand. The Shadow Hand is radically changing how we think about robotics and holds remarkable potential for a variety of industries, including manufacturing, healthcare, and research. In Part 1 of this series, we discussed the history and evolution of robotic hands, and introduced the advancements made by the Shadow Robot Company. If you haven’t read it yet, we invite you to check it out!
The Shadow Dexterous Hand Series
The Shadow Robot Dexterous Hand series includes several products, each with its own features and capabilities designed to meet a variety of research requirements. The Lite, Extra Lite, and Super Lite models have the same cutting-edge technology as the flagship hand, with fewer fingers for reduced size, weight, and cost. Here is an outline of the different products in the range and their key differences.

- Dexterous Hand – This is the original robotic hand developed by Shadow Robot Company. It has four fingers and one thumb, with 20 actuated degrees of freedom and 4 underactuated movements, for a total of 24 joints. It has an overall weight of 4.3 kg.

- Dexterous Hand Lite – This is a lighter and more compact version of the Dexterous Hand. It has three fingers and one thumb, with 13 actuated degrees of freedom and a total of 16 joints. It weighs 2.4 kg.
- Dexterous Hand Extra Lite – This hand has two fingers and one thumb, with 10 actuated degrees of freedom across 12 joints, and weighs 2.1 kg.
- Dexterous Hand Super Lite – The smallest hand in the series has one finger and one thumb, with 7 actuated degrees of freedom across 8 joints. This hand is also the lightest, weighing in at 1.8 kg.
Technology Used by the Shadow Dexterous Hand
The technology that enables the hand’s extraordinary dexterity is based on a combination of mechanical, electrical, control, and software systems. This section provides a more detailed look at the technology behind the Dexterous Hand series.
Mechanical Profile
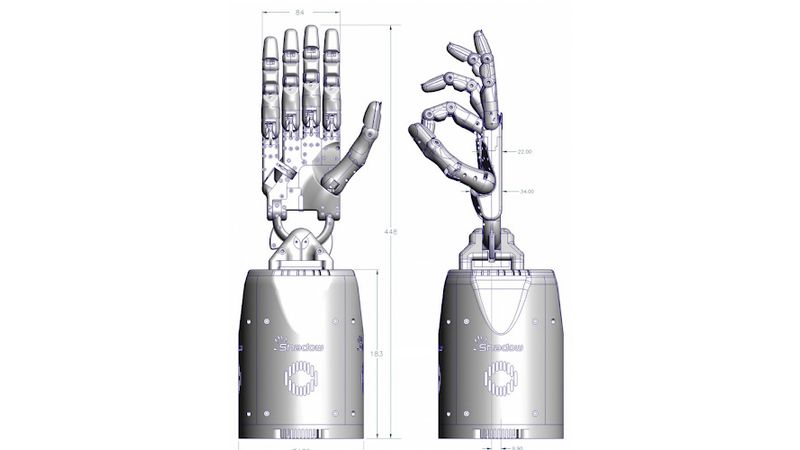
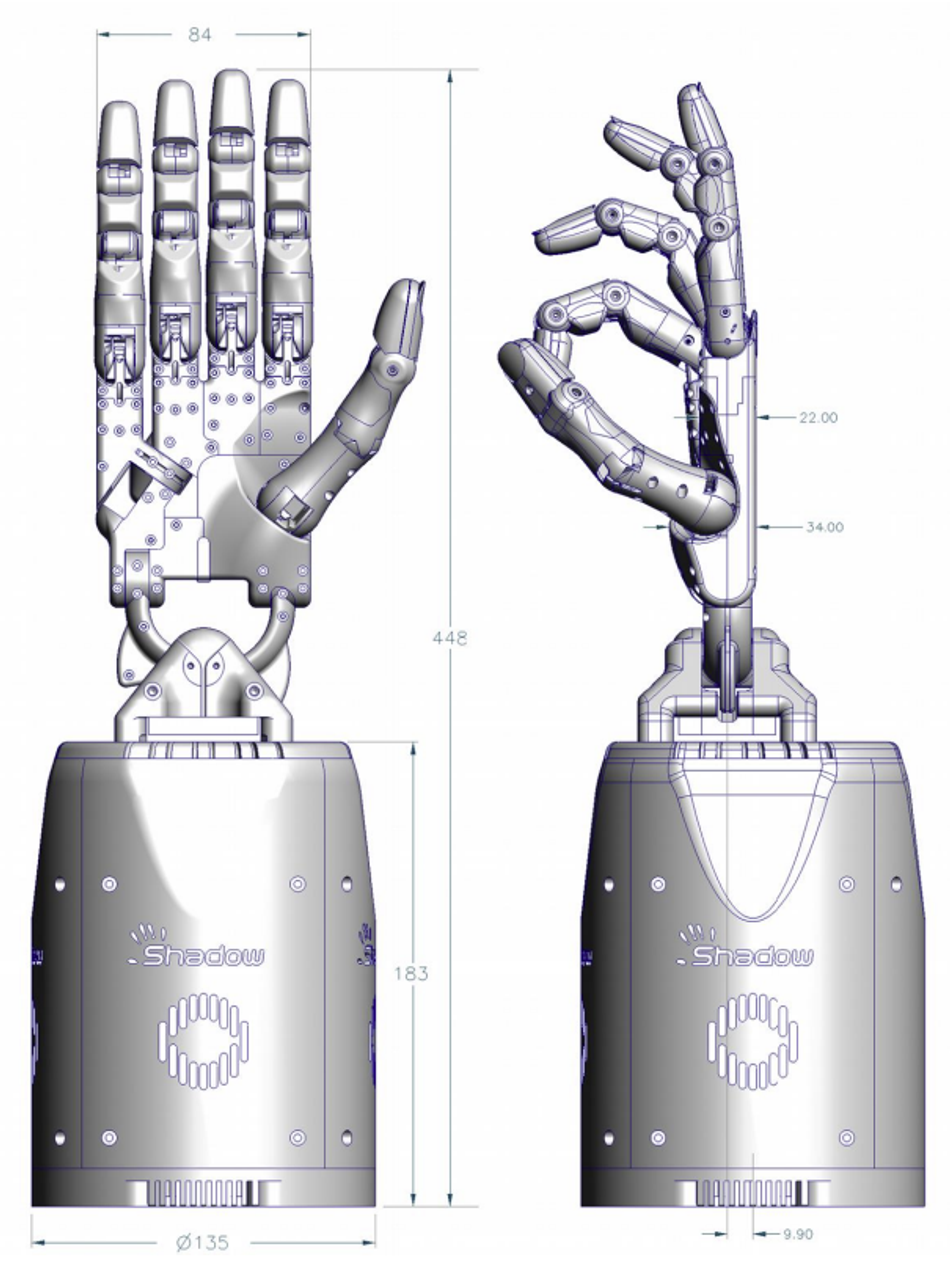 Shadow Dexterous Hand Dimensions. Each finger is the same length, with knuckles positioned so that fingers are in a location similar to the human hand. | Source: shadowrobot.com
Shadow Dexterous Hand Dimensions. Each finger is the same length, with knuckles positioned so that fingers are in a location similar to the human hand. | Source: shadowrobot.com
- Kinematic Structure – The full-size Dexterous Hand has 20 degrees of freedom across 24 joints. The thumb has five degrees of freedom and five joints. Each finger has three degrees of freedom across four joints. The joints at the distal phalange and middle phalange (Finger 1 and Finger 2 in the diagram above) are coupled to move like the corresponding joints in the human hand. The little finger has an extra joint to oppose the thumb.
- Payload – The full-size Dexterous Hand can hold up to 5 kg while in a power grasp, while the Lite Dexterous Hand can hold 4 kg, and the Extra Lite holds up to 3 kg.
- Speed – All hands in the Dexterous Hand series have a maximum speed of 120 degrees per second, with full range of motion in free space. Speed can be adjusted and is dependent on safety settings in the control system.
- Material – All versions of the Dexterous Hand are made from a combination of hard and soft materials, including aluminum, brass, acetyl, polycarbonate, and polyurethane.
Electrical Profile
- Power – The Dexterous Hand comes with a 48 V DC power supply that delivers a maximum of 2.5 A. The Lite and Extra Lite versions of the hand have a 24 V DC power supply that can also deliver up to 2.5 A.
- Actuation – The Dexterous Hand uses Shadow Robot’s electric Smart Motor actuation system, which integrates force and position controls, motor drive, motor, gearbox, sensors, and bus communications into a single module. The full-size hand houses 20 of these modules in its base.
Control System
- Communication – All versions of the Dexterous Hand use a 100 Mbps EtherCAT bus for controls communication. This standard ethernet-based fieldbus means that the hand is compatible with many existing control systems for both research and industrial use.
- Microcontrollers – The Dexterous Hand has a set of embedded microcontrollers that give the operator control throughout the system, including the fingers, thumb, palm, and tactile sensors.
- Motor Hand Features – The Dexterous Hand uses brushless DC motors to control the movement of the fingers and thumb.
- Sensors – The Dexterous Hand is equipped with a range of sensors, including position sensors, tactile sensors, force sensors, and temperature sensors. These sensors allow the hand to detect objects and positioning, and adjust its movements accordingly.
Software
- Open Platform – The Dexterous Hand is built on an open platform, so that users can customize and modify the software to meet their specific needs.
- ROS Compatibility – The Dexterous Hand is compatible with the Robot Operating System (ROS), an open-source software framework for robotics. Shadow Robot’s ROS-based software integrates a full physics model for grasping and manipulation. ROS simulation capabilities make it easy to test software with a simulation first, then try it on the hardware.
The advanced technology behind the Shadow Dexterous Hand is a combination of mechanical, electrical, control, and software systems. These precisely engineered systems allow the hand to replicate the dexterity and flexibility of the human hand.
Custom Integrations with the Shadow Dexterous Hand
The Shadow Dexterous Hand is designed to be highly customizable so that users can integrate a wide range of components and controls to perform various tasks. The following are some examples of custom integration with the Dexterous Hand.
BioTac Sensor Integration
 BioTax sensors can detect the same sensory information as a human fingertip. | Source: shadowrobot.com
BioTax sensors can detect the same sensory information as a human fingertip. | Source: shadowrobot.com
Shadow Robot’s Dexterous Hand can be integrated with BioTac sensors by SynTouch. The BioTac sensor is a highly sensitive tactile sensor that is designed to detect the same sensations that a human fingertip can detect, including pressure, vibration, and temperature. By integrating the BioTac sensor with the Dexterous Hand, users can perform tasks that require sensitivity and precision, like handling fragile objects or performing surgical procedures.
Adding an Arm
 The Shadow Dexterous Hand integrated with Shadow Robot's UR10 arm. | Source: shadownrobot.com
The Shadow Dexterous Hand integrated with Shadow Robot's UR10 arm. | Source: shadownrobot.com
The Dexterous Hand can be integrated with different types of robotic arms to perform tasks that require a greater range of motion than the hand provides on its own. For example, the Dexterous Hand can be integrated with the Shadow Robot Universal Robot Arm, which can be configured with up to seven degrees of freedom.
Controlling the Hand Remotely
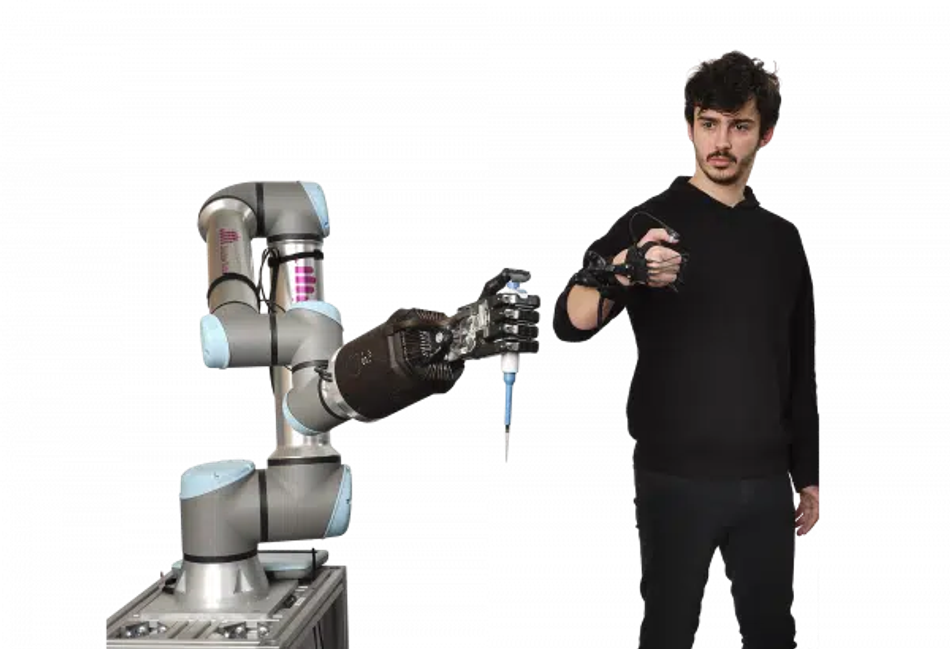 The Dexterous Hand and Universal Robot Arm integrated with Shadow Robot's Teleoperation system. | Source: shadowrobot.com
The Dexterous Hand and Universal Robot Arm integrated with Shadow Robot's Teleoperation system. | Source: shadowrobot.com
The Dexterous Hand can be controlled remotely using a range of technologies, like teleoperation or virtual reality. Users can operate controls from anywhere and perform tasks in environments that are difficult or dangerous to access, such as space or deep-sea exploration. The Dexterous Hand can be remotely operated with accuracy thanks to the hand’s precise controls.
The Shadow Robot Dexterous Hand is designed to be highly customizable. By integrating the Dexterous Hand with other technologies, users can create complete robotic systems that are capable of performing complex tasks with a high degree of precision.
Case Studies
The Shadow Dexterous Hand has contributed to advancements in the field of robotic manipulation and a deeper understanding of human-like dexterity for robotic hands. Past and current research efforts that employ the hand have the potential to impact various industries. This section highlights a few of the case studies and outcomes for research projects that have used the Dexterous Hand.
OpenAI
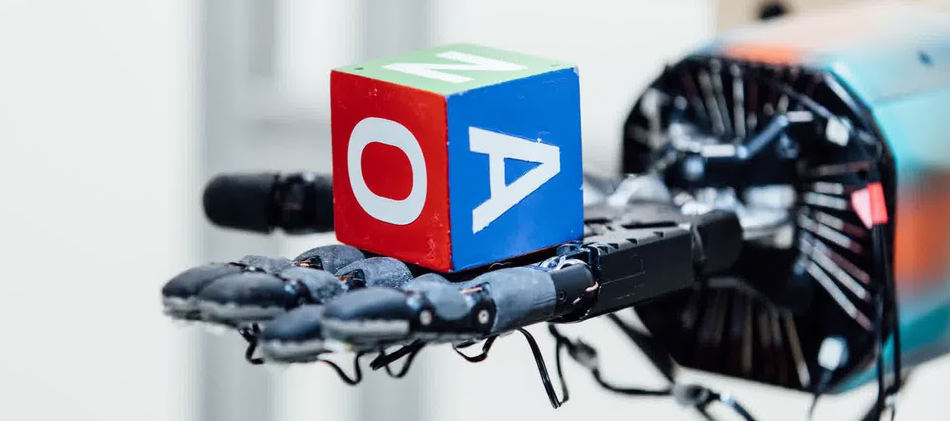 OpenAI's Dactyl holding a block with the Shadow Dexterous Hand. | Source: openai.com
OpenAI's Dactyl holding a block with the Shadow Dexterous Hand. | Source: openai.com
OpenAI created their Dactyl system using the Shadow Dexterous Hand to research robotic manipulation and dexterity. They used the Dexterous Hand to train a neural network to perform intricate tasks. Researchers placed an object in the robot’s hand and asked it to reorient the object to a specific position. To do this, Dactyl used data from fingertip positioning and visualizations. The study demonstrates the potential for using machine learning to improve the dexterity of robot hands.
Google Brain
 The Google Brain project shows that the Shadow Dexterous Hand can learn to manipulate multiple objects at once. | Source: shadowrobot.com
The Google Brain project shows that the Shadow Dexterous Hand can learn to manipulate multiple objects at once. | Source: shadowrobot.com
Google used the Dexterous Hand in their Google Brain project to research robotic grasping and manipulation. They used the hand to test the deep dynamics model (DDM) for grasping multiple objects and objects with complex shapes. In one test, the system successfully learned how to turn two Baoding balls around each other in the palm without dropping them using only 2.7 hours worth of data. This study demonstrates the potential for using advanced algorithms and sensors to improve the ability of robotic hands to manipulate objects in real-world environments.
Bielefeld University
 Bielefeld University used a paid of Shadow Dexterous Hands for precise grasping and manipulation, and object identification. | Source: shadowrobot.com
Bielefeld University used a paid of Shadow Dexterous Hands for precise grasping and manipulation, and object identification. | Source: shadowrobot.com
Bielefeld University has conducted extensive research on robotic hands using the Shadow Robot Dexterous Hand. Researchers at Bielefeld have used the Dexterous Hand to advance tactile sensing and control for fine object manipulation and identification. They have successfully used the hand to inspect and identify the properties of an object by grasping it and manipulating it. This project demonstrates the potential for dextrous hands and advanced algorithms to learn how to handle and use an object based on its physical properties.
Conclusion
The Shadow Robot Dexterous Hand is a technological achievement that has the potential to transform industries. The hand’s advanced design replicates the dexterity and flexibility of the human hand, making it ideal for complex tasks that require precision and accuracy. Shadow Robot’s Dexterous Hand series offers a range of options to meet specific research needs and applications, and it can be customized and integrated with numerous components and systems.
In Part 3 of this series, we will introduce Shadow Robot’s Dexterous Hand and Glove technology, showcasing the capabilities of the lightweight Shadow Glove, its use in teleoperation, and how advancements in dexterous hand technology can unlock applications for robotics that researchers and engineers have dreamed of for decades.
For more information about the Shadow Robot Company, please visit https://www.shadowrobot.com/
References
[1] Shadow Robot. Dexterous Hand Series. Accessed from https://www.shadowrobot.com/dexterous-hand-series/
[2] Additional details about Shadow Robot’s Dexterous Hand technology can be found in the Shadow Dexterous Hand Technical Specification. https://www.shadowrobot.com/wp-content/uploads/2022/03/shadow_dexterous_hand_e_technical_specification.pdf
[3] Additional details about custom integrations for Shadow Robot’s Dexterous Hand can be found in the Shadow Dexterous Hand Technical Specification. https://www.shadowrobot.com/wp-content/uploads/2022/03/shadow_dexterous_hand_e_technical_specification.pdf
[4] OpenAI. Learning Dexterity. Accessed from https://openai.com/research/learning-dexterity
[5] Kyle Wiggers (2019). “Google’s robotic hand AI can learn to rotate Baoding balls with minimal training data”. Venture Beat. Accessed from https://venturebeat.com/ai/google-robotic-hand-ai-can-rotate-baoding-balls-with-under-4-hours-of-training-data/
[6] Shadow Robot. “Video: University of Bielefeld using Shadow Hand in their ‘self-learning’ research”. Accessed from https://www.shadowrobot.com/news/company-news/video-university-of-bielefeld-using-shadow-hand-in-their-self-learning-research/