Navigating the Future of Robotics: Innovations and Challenges in Robot Grasping
A glimpse into the latest research advances in robotics grasping, showcasing the ongoing evolution and intricate challenges in this field.

16 Feb, 2024. 5 minutes read

Robotics has been pushing technology and innovation and inspiring ambitious research for ages, since the Greek mathematician and philosopher Archytas of Tarentum postulated the existence of a steam-powered bird in the 4th century BC. Among the various aspects of robotics, robot grasping remains one of the most challenging yet crucial capabilities in fully functional robotic systems. Grasping is not just about having a robot hold an object; it's about how the robot perceives, plans, and executes this interaction with precision and adaptability.
This complexity makes robot grasping a fascinating area for researchers and engineers alike. The editorial "Current Challenges and Future Developments in Robot Grasping" by Antonio Morales, Beatriz León, Eris Chinellato, and Raúl Suárez, published in Frontiers in Robotics and AI, dives deep into these challenges and the strides being made in this field.
In this article, we take a look at the significance of robotic grasping and why researchers continue to pursue this major challenge in robotics. We also discuss the research itself, the advances already being made, and the challenges outlined in the editorial by Morales et al.
The Significance of Grasping in Robotics
Robot grasping is more than a mechanical action; it's a symphony of intricate processes that must work in harmony. When a robot performs a grasp, it must first understand the object, plan the grasp, and then execute it in a way that mimics the dexterity and adaptability of the human hand. This capability has wide-ranging applications, from manufacturing and logistics to healthcare and service industries, and has the potential to transform these fields by performing precise work while keeping humans safe. However, the complexity of grasping, which involves handling diverse objects in varied environments, makes it a particularly tough nut to crack in robotics.
Recent Advances in Robot Grasping
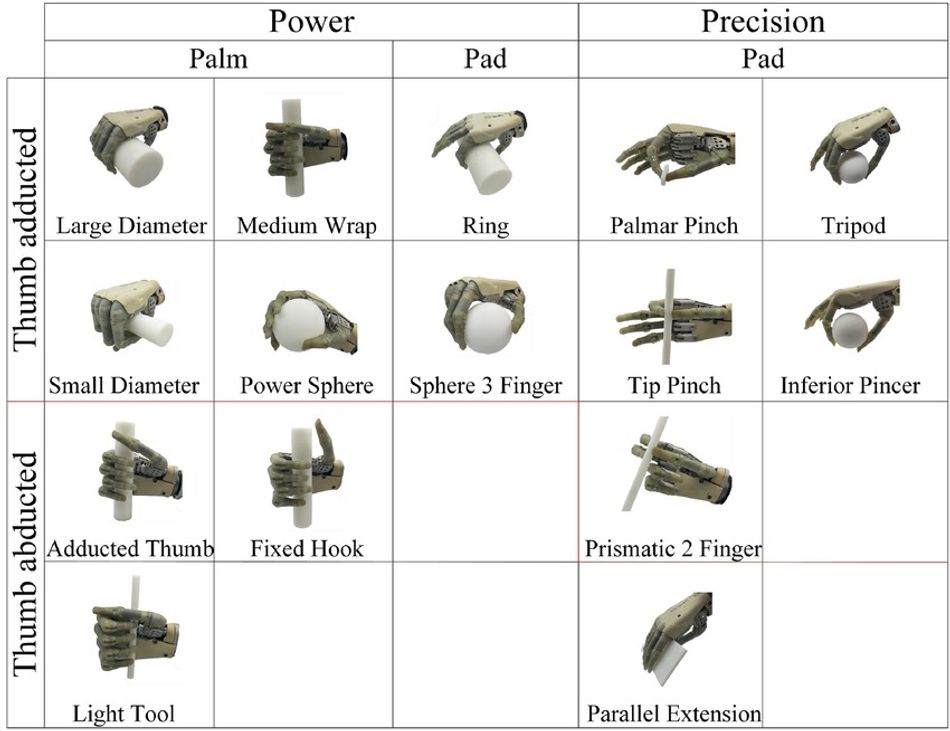
In recent years, the field of robot grasping has seen a significant shift towards integrating advanced computational techniques, such as deep learning, to enhance perception, planning, and control. Deep learning applications in robot grasping are not confined to just object recognition; they extend to understanding the nuances of different types of grasps, like a power grip with the whole hand and palm, or a precise grip between fingertips, as well as the dynamics of object manipulation.
Another area of advancement is in the design and development of novel grippers and robotic hands. The focus of this research is on soft mechanism principles, which aim to create more adaptable and versatile gripping solutions. For example, the use of soft materials for fingertips improves the hold a robotic hand has on an object and allows for finer manipulation of objects. These innovative grippers are designed to handle a variety of objects with different shapes, sizes, and textures, much like the human hand.
A hand for deep research
Shadow Robot is the developer of a highly dexterous robotic hand, and is a company that works closely with researchers to improve the computational techniques related to grip and the future of robotic applications. By providing researchers with the most cutting-edge hardware, teams that use the Shadow Hand can focus on their specific goals rather than being sidelined by their own hardware development issues.

Highlighted Research and Innovations: A Closer Look
One of the notable aspects of the editorial "Current Challenges and Future Developments in Robot Grasping" is the involvement of Beatriz León from Shadow Robot Company, a leading firm in robotic hands and grasping technology. This association is significant because it reflects the blend of academic research and practical industry applications in the field of robotics.
Shadow Robot Company's Contributions
Shadow Robot Company, known for its advanced robotic hand solutions, represents the forefront of applying practical, innovative solutions to the challenges of robot grasping. The integration of the company’s expertise in this research editorial underscores the essential collaboration between academia and industry in pushing the boundaries of robotic technology.
Innovative Approaches in Robot Grasping
Overcoming the challenges of robotic grasping has the potential to result in huge benefits to both industry and the academic world. Prioritising this challenge has led to some innovative approaches to grasping in robotics research. Here are some examples.
1. Experience-Based Robotic Grasping
The paper titled “DGCM-Net: Dense Geometrical Correspondence Matching Network for Incremental Experience-Based Robotic Grasping,” highlights a method where robots learn from past successful grasping experiences. This approach is crucial for handling novel objects, enabling robots to adapt previous grasping strategies to new situations.
2. Human Perception in Robot Grasping
“Leveraging Human Perception in Robot Grasping and Manipulation Through Crowdsourcing and Gamification” showcases a unique combination of crowdsourcing and gamification. This framework aims to enhance object recognition by tapping into human intelligence, a creative solution that blurs the lines between human and machine learning.
3. Heuristic-Based and Data-Driven Active Vision
The paper “Aiding Grasp Synthesis for Novel Objects Using Heuristic-Based and Data-Driven Active Vision Methods,” offers an innovative perspective on optimising data collection for grasp synthesis. Using a two-finger parallel gripper and a depth camera, this research presents a new angle on active vision in robotics.
4. Combining Depth Vision and Haptic Bayesian Exploration
Another groundbreaking study, “Grasp Stability Prediction for a Dexterous Robotic Hand Combining Depth Vision and Haptic Bayesian Exploration,” addresses the challenge of stable grasp selection. This research uses a multimodal approach, combining visual and tactile explorations, to improve the reliability of grasping actions.
The Role of Shadow Robot in Advancing Grasping Technology
The involvement of Shadow Robot Company, particularly through Beatriz León's contributions, brings an element of real-world application to these research findings. The company's expertise in developing advanced robotic hands plays a pivotal role in translating these academic insights into tangible, practical solutions for various industries.
The Shadow Hand itself is innovative, and provides highly dexterous manipulation with multiple degrees of freedom and tactile sensing. The Shadow Hand can be integrated with other systems, meaning that researchers can apply artificial intelligence to its control systems to improve how it can learn and adapt to new tasks through machine learning. The Shadow Glove, a teleoperated controller for the Shadow Hand is also highly customizable and allows for the integration of custom feedback mechanisms and tactile sensor, offering even more precise control of the hand in real-world settings.
The Future of Robot Grasping
As the field of robot grasping evolves, the synergy between academic research and industry expertise becomes increasingly vital. Companies like Shadow Robot are not just implementing these findings but are also instrumental in shaping the direction of future research. Shadow Robot’s practical experience in the field of robotic grasping provides valuable knowledge and data to the academic community by helping refine theories and models for better applicability in real-world scenarios.
Conclusion: Bridging Academia and Industry
Robotic grasping remains a significant challenge in the field of robotics, but it is one worth pursuing. The potential for this technology to shape industries and how humans work means that researchers are constantly seeking new grasping technologies, using sensors, machine learning, and soft mechanics to reach human-like precision and dexterity.
The editorial by Beatriz León, et al. explores current challenges and future developments in robot grasping, enriched by the involvement of Shadow Robot Company. The article is a testament to the dynamic nature of robotics research. It highlights the importance of collaboration between academia and industry in driving innovation, ensuring that advancements in robot grasping continue to be both groundbreaking and applicable in practical settings. As we move forward, this collaborative approach will be crucial in navigating the complex landscape of robotics and automation.
References
Akhtar Khurshid, Abdul Ghafoor, and M. Afzaal Malik “Robotic Grasping and Fine Manipulation Using Soft Fingertip” in Advances in Mechatronics. Accessed from https://www.intechopen.com/chapters/18895