Printed robots with bones, ligaments, and tendons
For the first time, researchers have succeeded in printing a robotic hand with bones, ligaments and tendons made of different polymers using a new laser scanning technique.
16 Nov, 2023. 3 minutes read

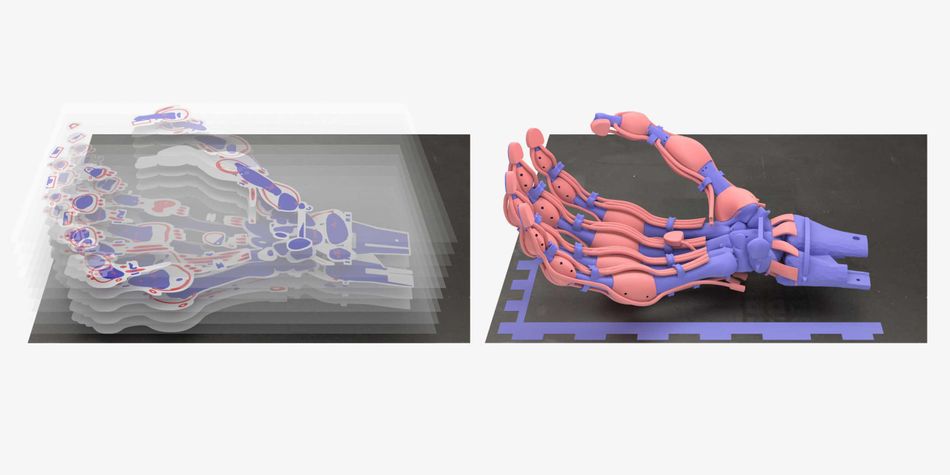
3D printed in one go: A robotic hand made of varyingly rigid and elastic polymers. (Photograph: ETH Zurich/Thomas Buchner)
This article was first published on
ethz.ch3D printing is advancing rapidly, and the range of materials that can be used has expanded considerably. While the technology was previously limited to fast-curing plastics, it has now been made suitable for slow-curing plastics as well. These have decisive advantages as they have enhanced elastic properties and are more durable and robust.
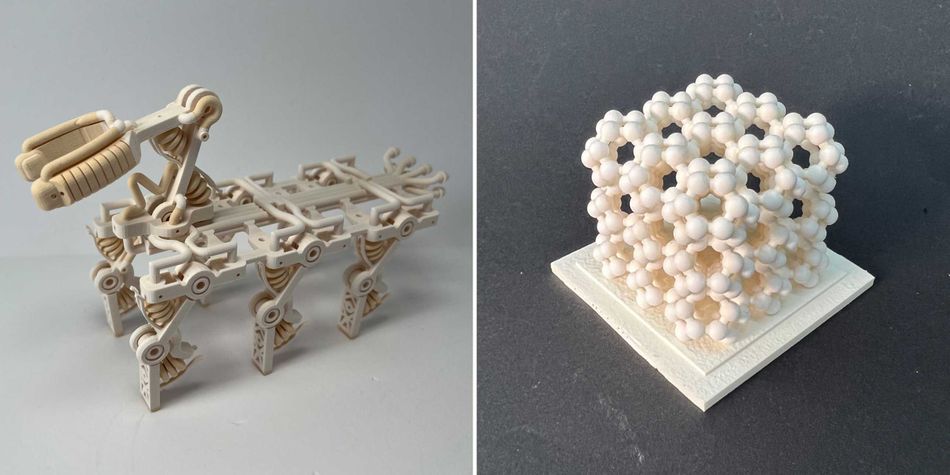
The use of such polymers is made possible by a new technology developed by researchers at ETH Zurich and a US start-up. As a result, researchers can now 3D print complex, more durable robots from a variety of high-quality materials in one go. This new technology also makes it easy to combine soft, elastic, and rigid materials. The researchers can also use it to create delicate structures and parts with cavities as desired.
Materials that return to their original state
Using the new technology, researchers at ETH Zurich have succeeded for the first time in printing a robotic hand with bones, ligaments and tendons made of different polymers in one go. “We wouldn’t have been able to make this hand with the fast-curing polyacrylates we’ve been using in 3D printing so far,” explains Thomas Buchner, a doctoral student in the group of ETH Zurich robotics professor Robert Katzschmann and first author of the study. “We’re now using slow-curing thiolene polymers. These have very good elastic properties and return to their original state much faster after bending than polyacrylates.” This makes thiolene polymers ideal for producing the elastic ligaments of the robotic hand.
(Video: ETH Zurich / Nicole Davidson)
In addition, the stiffness of thiolenes can be fine-tuned very well to meet the requirements of soft robots. “Robots made of soft materials, such as the hand we developed, have advantages over conventional robots made of metal. Because they’re soft, there is less risk of injury when they work with humans, and they are better suited to handling fragile goods,” Katzschmann explains.
Scanning instead of scraping
3D printers typically produce objects layer by layer: nozzles deposit a given material in viscous form at each point; a UV lamp then cures each layer immediately. Previous methods involved a device that scraped off surface irregularities after each curing step. This works only with fast-curing polyacrylates. Slow-curing polymers such as thiolenes and epoxies would gum up the scraper.
To accommodate the use of slow-curing polymers, the researchers developed 3D printing further by adding a 3D laser scanner that immediately checks each printed layer for any surface irregularities. “A feedback mechanism compensates for these irregularities when printing the next layer by calculating any necessary adjustments to the amount of material to be printed in real time and with pinpoint accuracy,” explains Wojciech Matusik, a professor at the Massachusetts Institute of Technology (MIT) in the US and co-author of the study. This means that instead of smoothing out uneven layers, the new technology simply takes the unevenness into account when printing the next layer.
Inkbit, an MIT spin-off, was responsible for developing the new printing technology. The ETH Zurich researchers developed several robotic applications and helped optimise the printing technology for use with slow-curing polymers. The researchers from Switzerland and the US have now jointly published the technology and their sample applications in the journal Nature.
At ETH Zurich, Katzschmann’s group will use the technology to explore further possibilities and to design even more sophisticated structures and develop additional applications. Inkbit is planning to use the new technology to offer a 3D printing service to its customers and to sell the new printers.
Reference
Buchner TJK, Rogler S, Weirich S, Armati Y, Cangan BG, Ramos J, Twiddy S, Marini D, Weber A, Chen D, Ellson G, Jacob J, Zengerle W, Katalichenko D, Keny C, Matusik W, Katzschmann RK: Vision-Controlled Jetting for Composite Systems and Robots, Nature, 15. November 2023, doi: external page10.1038/s41586-023-06684-3