The art of compliant robotics
DLR's concept allows collaborative robots to yield without being forced back to their original position like a mechanical spring.
19 Mar, 2025. 3 minutes read
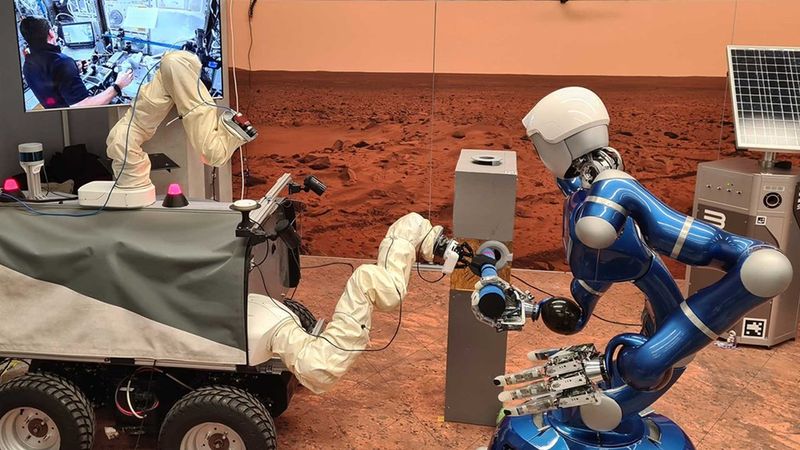
Remote-controlled from the ISS − DLR Rollin' Justin robot and the ESA Interact Rover. DLR's autonomous humanoid robot Rollin' Justin (right) and the ESA Interact Rover (left) being controlled from the International Space Station ISS. They are cooperating on the handling of a tool. Credit: DLR (CC BY-NC-ND 3.0)
This article was first published on
www.dlr.deThe use of robots alongside humans is increasing rapidly, making the flexibility of these machines an important safety feature. A robot's ability to adapt flexibly to its surroundings makes the difference between smooth operation and potential hazards, such as collisions with people nearby. The German Aerospace Center (Deutsche Zentrum für Luft- und Raumfahrt; DLR) has established itself as a pioneer in the field of cobots – collaborative robots that work in close cooperation with humans. Until now, the goal of cobot research has been to design robots that behave like a mechanical spring – if moved towards a desired position, they will always return to their original position. DLR researchers have now presented a more advanced concept in the journal Science Robotics. Their approach allows robots to yield without returning to their original position like a spring. This behaviour is similar to that of humans in joint practical tasks that need to be completed, where one person takes the lead while the other remains flexible and compliant.
Michael Panzirsch, researcher at the DLR Institute of Robotics and Mechatronics, explains: "The new elasto-plastic approach makes human-robot collaboration much easier, as the robot can now clearly distinguish between its own programmed movements and external influences from the environment. The robot should only react plastically to the influence of the environment, meaning it should move out of the way and remain in that spot."
In addition, the innovative controller generally simplifies interactions with objects that have a complex movement. For example, a hinged door can only be opened by rotating it around its axis. The robot follows the correct direction of movement – the circular motion around the hinges – almost automatically via the controller and without the need for an additional model of the door. This is comparable to a person opening a door with their eyes closed, simply pulling on the door handle and automatically adapting to the rotating motion in a plastically compliant manner.
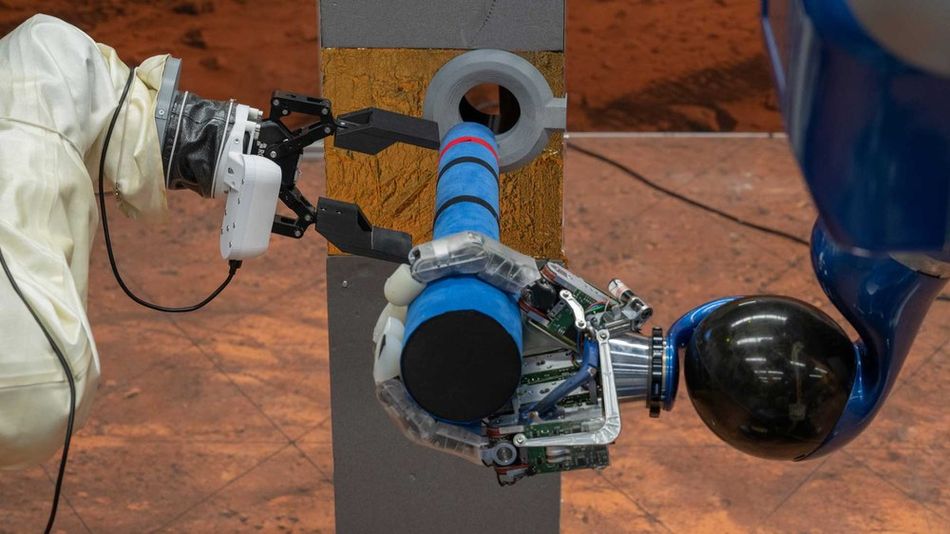
While the arm of the DLR humanoid robot (right) independently carries an object, an astronaut controls the ESA Interact Rover's arm (left). The astronaut guides the object to the target position. The new approach allows for the humanoid to maintain the object's rotation while yielding to the rover arm during linear movements.
Credit: DLR (CC BY-NC-ND 3.0)
Applications in space research and care
The DLR Institute of Robotics and Mechatronics has been researching sensitive robots for decades. It has developed a robotic arm that stands out from conventional rigid industrial robots thanks to its remarkable flexibility. The elasto-plastic control approach was successfully tested in space as early as January 2024. The Surface Avatar project series is investigating the teleoperation of several robotic avatars on a planetary surface. The focus here is on the successful cooperation between a diverse team of robots performing collaborative tasks. "For the first time, our controller enabled cooperation between a rover from the European Space Agency's Human Robot Interaction Laboratory and a humanoid DLR robot controlled by an astronaut on the International Space Station," explains Neal Y. Lii, Scientific Director of the Surface Avatar programme.
But the versatility of the technology is not limited to space. In the care sector, the elasto-plastic controller is proving to be a valuable aid. As part of the SMiLE project (Services for People with Living Conditions and Restrictions; Servicerobotik für Menschen in Lebenssituationen mit Einschränkungen), DLR researchers like Jörn Vogel are developing concepts for assistance systems designed to effectively support people with physical limitations and those in need of care in everyday life. The elasto-plastic controller not only facilitates cooperation between humans and robots but also enables the robot to seamlessly slip into an assistant role without requiring complex additional sensor technology.
Advances in robotics, particularly in terms of compliance and adaptability, not only accelerate the integration of robots into everyday life but also increase safety and effectiveness. In a future where humans and machines work ever more closely together, it will be crucial for robots to not only react but also interpret our needs and idiosyncrasies, thereby mirroring human capabilities.