Underwater Positioning 101: Navigating the Depths with ROVs
Discover the essential role of underwater positioning, and how remotely operated vehicles are advancing accuracy in underwater inspections and surveys.
08 Nov, 2024. 10 minutes read

operator piloting underwater ROV on Deep Trekker handheld controller
This article was first published on
www.deeptrekker.comUnderwater positioning plays a key role in subsea operations, allowing for precise location tracking for tasks ranging from detailed surveys to asset maintenance. The unique challenges of underwater navigation demand specialized solutions, and remotely operated vehicles (ROVs) have become an essential tool in addressing these needs.
This article explores the fundamental methods of underwater navigation and highlights how Deep Trekker ROVs, equipped with advanced technologies like Dead Reckoning, ROV GPS, USBL, and IMU systems, are overcoming traditional challenges in subsea navigation.
What is Underwater Position Tracking?
Underwater position tracking refers to the techniques used to determine the precise location of an object, vehicle, or asset beneath the water's surface during underwater operations.

Unlike terrestrial environments where GPS provides reliable location data, subsea navigation requires alternative methods due to signal attenuation in water. Because traditional GPS signals cannot penetrate water, underwater tracking relies on alternative methods such as acoustic positioning systems, inertial navigation, and dead reckoning, each suited to different operational needs and environments.
The primary methods of underwater positioning include:
Acoustic Positioning: Systems such as USBL use acoustic signals to triangulate the position of an underwater robot relative to surface transceivers or fixed seabed stations. DVL systems measure the vehicle's velocity relative to the seabed and integrate the data to provide location information. It is often used in tandem with other methods to improve accuracy. Acoustic methods are widely used in deep-water environments due to their accuracy over large distances.
Dead Reckoning: A technique that estimates the current position based on the known starting location, along with the speed and direction of movement. While this method is not absolute, it provides a continuous position update, especially when other technologies are limited.
Inertial Navigation: Systems such as IMUs (Inertial Measurement Units) track motion and orientation based on accelerometers and gyroscopes. When combined with dead reckoning, this provides continuous positional estimates when no external signals are available.
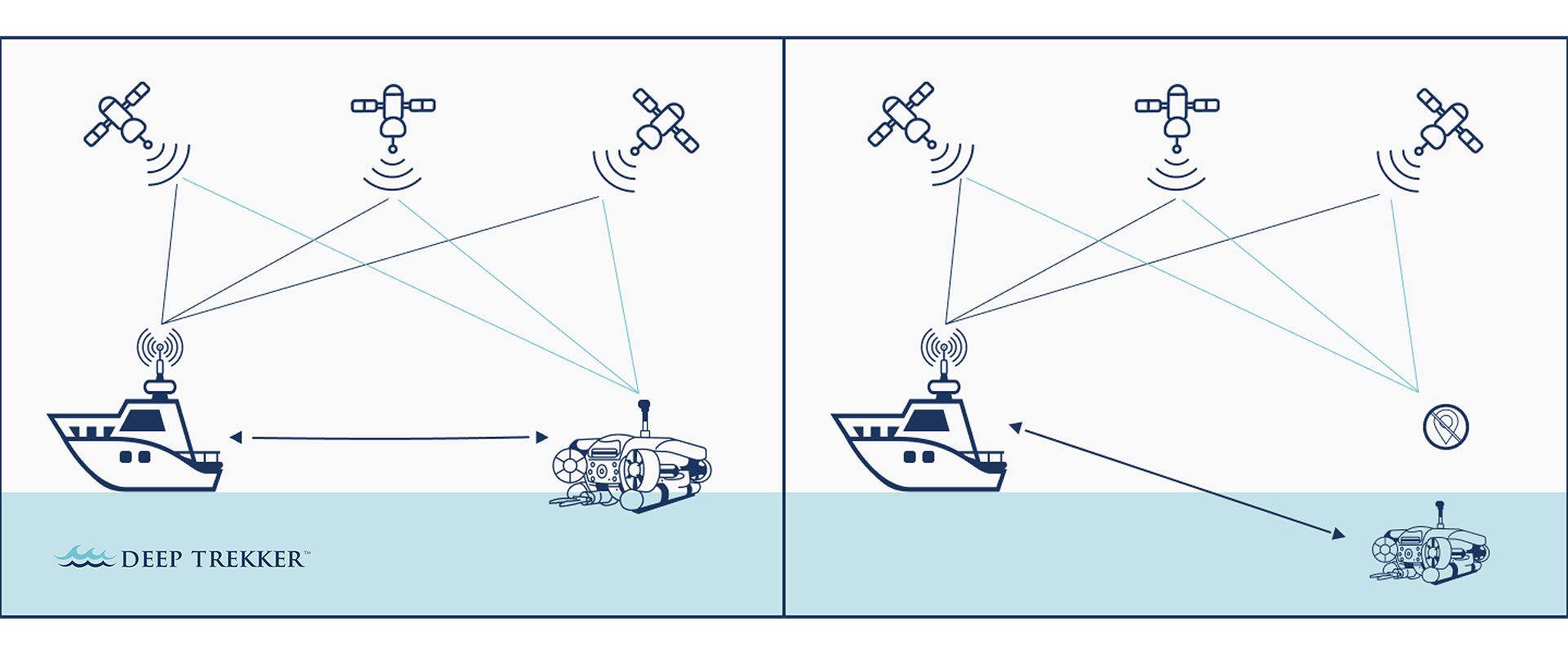
Surface GPS: Though ineffective underwater, GPS can be used to track surface vessels or floating buoys. This data can then be integrated with other navigational methods to improve positioning accuracy when the ROV surfaces.
Each method has its strengths and limitations, and in many cases, a combination of technologies is used to ensure consistent and accurate positioning during underwater operations. Deep Trekker's ROVs utilize a blend of these technologies, allowing for precise control and reliable navigation even in complex underwater environments.
Industry Overview: The Evolution of Underwater Positioning
In underwater operations, precise positioning has always been a major challenge, particularly for surveys and inspections. Historically, underwater navigation relied on basic mechanical compasses and manual tether management, offering limited accuracy.
Over time, acoustic methods like long baseline (LBL), short baseline (SBL), and ultra-short baseline (USBL) systems emerged, leveraging underwater acoustics to pinpoint ROV locations. These methods, alongside DVL (Doppler Velocity Log), have become industry standards for underwater navigation. Today, advancements in inertial measurement units (IMUs), such as MEMS (Micro-Electromechanical Systems) and fiber-optic gyroscopes (FOG), enable real-time tracking of ROVs, significantly improving data collection.
By combining acoustic positioning systems with ROV GPS, Deep Trekker underwater robots offer incredible accuracy. The integration of various technologies, from dead reckoning to USBL, allows these ROVs to operate efficiently across different sectors, including marine research, asset maintenance, and offshore inspections.
Why GPS Cannot Work Underwater
Global Positioning Systems (GPS) cannot function below the water’s surface due to rapid signal attenuation in water. While radio waves travel efficiently through air, they are absorbed by water molecules, making GPS ineffective for underwater operations. As a result, ROV operators have had to rely on acoustic positioning systems and inertial navigation to provide accurate underwater location data.
Navigational Innovations: Deep Trekker's Approach
Deep Trekker ROVs incorporate a range of cutting-edge navigational technologies to address the unique demands of underwater operations. From Dead Reckoning to ROV GPS, each system plays a pivotal role in ensuring that ROVs can accurately determine their position in environments with no direct reference points.
ROV GPS
Deep Trekker’s ROV GPS offers a new level of accuracy and control in surface-based position tracking for underwater operations. Designed to seamlessly integrate with the REVOLUTION and PIVOT ROVs, the GPS module mounts easily on the ROV, providing real-time positional updates when the ROV surfaces.
This system automatically recalibrates based on GPS data, allowing for stable, precise tracking during missions. By working in tandem with Dead Reckoning technology, the ROV GPS enhances operational accuracy, achieving up to 2.5 cm precision with RTK/SBAS compatibility, with support for GPS, GLONASS, BeiDou, and Galileo constellations.
While traditional GPS is ineffective underwater, Deep Trekker’s ROV GPS system utilizes surface positioning to keep the ROV on track. By integrating with the Mission Planner, operators can track the ROV’s surface position and correlate it with known coordinates, ensuring accurate navigation during underwater surveys, inspections, and asset maintenance.

Dead Reckoning for ROVs
Dead Reckoning is a fundamental navigation method used in the absence of GPS signals. It calculates position by tracking the direction and distance traveled from a known starting point. Deep Trekker ROVs employ this method, combined with sensor data, to maintain positioning accuracy even in complex underwater environments.
Utilizing a combination of inertial sensors, gyroscopes, accelerometers, and advanced algorithms, combined with acoustic navigation (DVL), Deep Trekker’s implementation of dead reckoning allows operators to achieve accurate spatial awareness and confidently navigate without GPS.
This method is especially useful for extended missions, where continuous positional updates are critical. With dead reckoning, inspectors can track the ROV’s position relative to predefined waypoints or planned paths, ensuring the inspection stays on course and covers all target areas thoroughly.
Mission Planner
Deep Trekker's Mission Planner feature utilizes advanced algorithms for intelligent pathfinding, allowing operators to pre-program routes. It integrates data from the ROV's various navigational systems, providing a comprehensive overview of the mission path.
After calibration, the ROV is ready to begin routing within seconds. Waypoints can be quickly added by dragging and dropping or by uploading preset coordinates via a CSV file. Once the path is set, the ROV will autonomously navigate between waypoints, with adjustable speed and depth settings, while simultaneously capturing data throughout the mission. Operators can use the mission planner to monitor progress in real-time, make adjustments, or review data post-operation, ensuring that no area is overlooked during surveys and inspections.

Importance of Precision in Underwater Surveys and Inspections
Subsea environments often lack reliable visual references, making it difficult to know the exact location of assets or hazards. This becomes even more important in deep-water environments, where the visibility is limited and human access is often restricted.
In underwater operations, precision determines the success of tasks such as structural inspections, bathymetric surveys, or resource extraction. These tasks often involve vast areas of interest where precise data collection is critical.
Deep Trekker ROVs enable this level of precision through a combination of advanced technologies that work together to provide continuous updates on the ROV’s position.
For example:
- Subsea Construction: Engineers rely on ROVs to monitor and assist with the construction of subsea structures, such as oil rigs or wind farms. Precision positioning helps to ensure components are installed correctly and that inspections during and after installation are accurate.
- Environmental Monitoring: Scientists conducting underwater surveys use ROVs to track and monitor marine ecosystems. Accurate positioning ensures data is collected from consistent locations, enabling effective monitoring of biodiversity changes over time.
For underwater inspections, being able to return to exact points is vital for monitoring changes or degradation over time. Acoustic systems like USBL, coupled with ROV GPS, allow operators to accurately retrace previous inspection paths. In underwater surveys, DVL and dead reckoning provide consistent data even when satellite signals are unavailable. These methods help ROVs maintain accurate positioning, essential for constructing reliable 3D models of underwater structures.
Some key underwater operations that benefit from reliable positioning include:
- Asset Maintenance: Regular inspections of subsea equipment, such as oil rigs and aquaculture nets, depend on accurate tracking to ensure thorough coverage of the inspection area.
- Underwater Surveys: Scientists and engineers conducting geological or environmental surveys need precise data to map the seafloor or monitor ecosystems.
- Pipeline Inspections: Oil and gas pipelines require ongoing inspection to prevent leaks or corrosion, often necessitating kilometer-long navigations beneath the surface.
Improving Underwater Data Collection with Positioning Technologies
Accurate positioning technologies are essential for enhancing data quality and operational efficiency in underwater inspections and surveys, such as pipeline assessments and environmental evaluations. Reliable location tracking ensures thorough inspections and dependable data collection, minimizing the risk of missed or incomplete assessments.
When positioning is precise, operators can gather comprehensive data without gaps or redundancies, facilitating detailed analysis. For asset maintenance, knowing the exact location of defects or corrosion allows for targeted repairs, which reduces operational downtime.
In underwater surveys, accurate positioning aids in creating 3D models of terrain and structures, critical for environmental monitoring where changes in seabed topology or flora must be detected over time. In commercial contexts like subsea cable installation, precise navigation prevents costly errors, such as unnecessary rerouting or overlooked inspection points.
Advances in underwater navigation enable engineers and scientists to improve data resolution, reducing errors and the need for revisits during surveys or inspections.
Choosing the Right Navigation Method for Different Underwater Operations
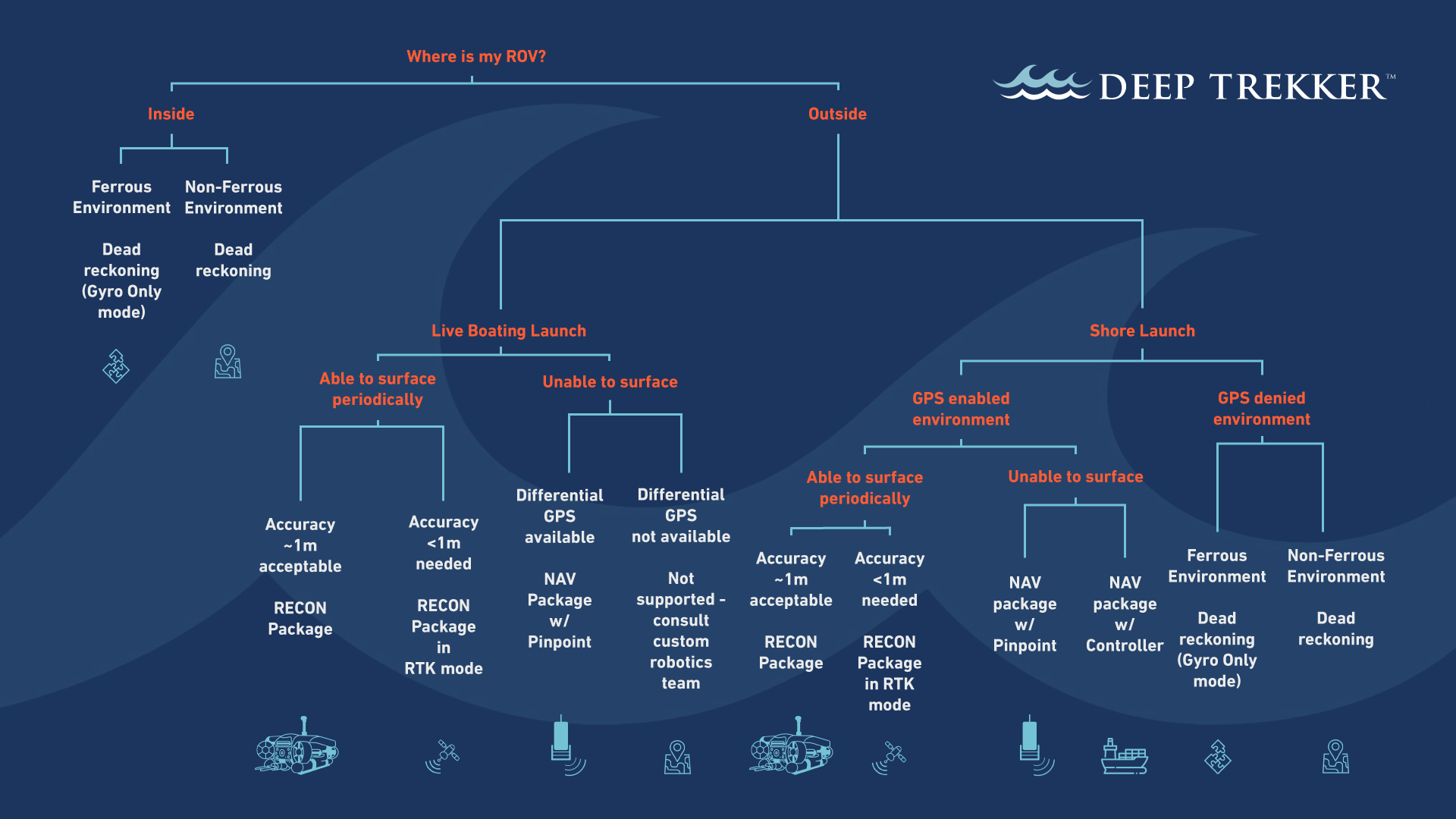
Selecting the appropriate underwater navigation method depends on the specific operational environment and the goals of the mission. From confined spaces to open waters, each scenario presents unique challenges. Below is an overview of which methods are best suited for various underwater tasks, including examples of real-world applications.
Ship Hull Inspections
For ship hull inspections, Dead Reckoning and ROV GPS provide effective navigation solutions. Dead Reckoning is particularly suited for hull inspections, as it eliminates the need to deploy a USBL system, which can face limitations when the ship obstructs the pings. Dead Reckoning ensures precise positioning along the hull, allowing for thorough inspection even in GPS-denied environments. Combined with Gyro-only mode, Dead Reckoning avoids issues with magnetic interference, ensuring accurate readings during the inspection.
When the ROV surfaces, ROV GPS recalibrates its position, providing accurate surface tracking relative to the ship. While USBL is often used in shallow waters, it’s less practical for ship hulls due to the potential obstruction of acoustic signals.
Best Navigation Method: Dead Reckoning with Gyro-only mode, combined with ROV GPS for continuous, interference-free tracking and accurate surface recalibration.
Search and Recovery
During search and recovery missions, the environment is often unpredictable, ranging from shallow coastal waters to deeper offshore zones. Dead reckoning is useful for maintaining continuous tracking when GPS or acoustic systems are unavailable, such as in murky or cluttered waters. Mission planner is also beneficial for tracking inspection paths and avoiding redundant searches in areas already thoroughly explored.
Best Navigation Method: Dead Reckoning for uninterrupted tracking in low-visibility or signal-restricted areas, with Mission Planner to manage coverage and avoid duplicating efforts.
Port Security
Port security inspections often take place in murky or confined environments. Here, IMU (Inertial Measurement Units) combined with dead reckoning are highly effective, especially where acoustic signals may be distorted by reflections from port infrastructure. These methods ensure that ROVs can track their position even when visual cues or external signals are limited.
Best Navigation Method: Dead reckoning, supplemented by USBL or ROV GPS in open areas of the port.
Marine Science and Surveying
Marine science missions, such as seafloor mapping and ecological surveys, require a broad range of navigation capabilities. USBL is preferred for open water due to its high accuracy at varying depths. For deep-sea exploration, DVL (Doppler Velocity Log) can assist in maintaining accurate speed measurements relative to the seafloor, while ROV GPS provides surface reference when operating near the water's surface.
Best Navigation Method: USBL for deep-water operations, with DVL and ROV GPS for surface-level tracking.
Offshore Inspections
Offshore inspections of oil rigs, pipelines, and underwater infrastructure demand high positional accuracy and the ability to navigate in complex environments. USBL systems are often used for accurate positioning, while IMU systems support dead reckoning for maintaining position in areas where acoustic signals may be blocked by large infrastructure.
Best Navigation Method: USBL with IMU-based dead reckoning for consistent positioning around complex offshore structures, or ROV GPS and Dead Reckoning may make sense depending on the location of the structure.
Nuclear Plant Inspections
Inspections inside nuclear plant water tanks or cooling ponds require precise, confined navigation. Dead reckoning is often the best method in these situations, as it provides continuous navigation in areas where external signals like GPS or acoustic tracking may be blocked by metal structures.
Best Navigation Method: Dead reckoning for accurate tracking in confined, signal-blocked environments.
Aquaculture Pen Inspections
Aquaculture pen inspections are often carried out in coastal waters where Dead Reckoning and ROV GPS are more suitable than USBL due to the challenges posed by netting and fish interference, which can disrupt USBL acoustic signals. Dead Reckoning enables precise navigation within the pen, maintaining accuracy even when GPS signals are unavailable. ROV GPS can assist with surface-level positioning to ensure complete coverage of the pen’s perimeter and infrastructure, such as netting or anchoring points.
Best Navigation Method: Dead Reckoning for continuous underwater tracking, complemented by ROV GPS for surface-level recalibration and perimeter coverage.
Pipeline or Cable Inspections
When inspecting pipelines or tunnels from the inside, dead reckoning allows for continuous navigation in confined or long, straight environments. Acoustic systems like USBL may be ineffective in these settings due to signal reflections or obstructions from the pipeline walls.
Best Navigation Method: Dead reckoning for confined, linear inspections.
When inspecting pipelines or cables on the sea floor from the outside, the ROV can utilize acoustic positioning like USBL. Depending on the depth and length, the user may prefer to not need to surface to recalibrate the position. In this case, USBL via our NAV package is likely the preferred method for performing the survey.
Best Navigation Method: USBL with Differential GPS
Water Tank Inspections
For water tank inspections, acoustic positioning systems like USBL may not be viable due to the reflective nature of the tank walls. Dead reckoning is the most effective method for continuous tracking in these confined environments. This ensures accurate positioning, even when acoustic or GPS signals are unavailable.
Best Navigation Method: Dead reckoning for confined water tank environments.
Other Underwater Operations
Other operations such as bridge inspections, dam maintenance, and offshore wind turbine inspections rely heavily on acoustic systems like USBL for accurate navigation. For confined inspections, dead reckoning remains the primary solution, while ROV GPS can provide additional surface tracking support when operations are near the surface.
Best Navigation Method: USBL or ROV GPS with dead reckoning in confined or complex infrastructure environments.
Advanced Underwater Navigation for Improved ROV Operations
Underwater navigation is an indispensable aspect of ROV operations, enabling operators to perform inspections, surveys, and asset maintenance with high precision. Deep Trekker’s innovations in dead reckoning, ROV GPS, and mission planning software offer reliable solutions to the longstanding challenges of underwater navigation. These technologies not only improve operational efficiency but also enhance safety and reliability in subsea operations.
By continually advancing these navigational systems, Deep Trekker helps organizations and researchers accomplish underwater tasks with accuracy and confidence, leveraging these tools to deliver precise, reliable performance in a variety of underwater environments.
Our skilled team is ready to provide expert guidance for a diverse range of applications, including hull vessel inspections, water tank evaluations, and underwater surveys across multiple industries. We deliver customized solutions tailored to meet your specific needs. When you're prepared to acquire your Deep Trekker ROV, don't hesitate to get in touch with us for a personalized quote.