Universal Robotic Gripper
A gripper which replaces individual fingers by a material that upon contact molds itself around an object. It forms to any shape and is passive, which means that all shape adaptation is performed autonomously by the contacting material and without sensory feedback. This process reduces the number of elements to be controlled and therefore has advantages in terms of reliability, cost, and gripping speed.













Technical Specifications
| Grain material |
Overview
This process reduces the number of elements to be controlled and therefore has advantages in terms of reliability, cost, and gripping speed.
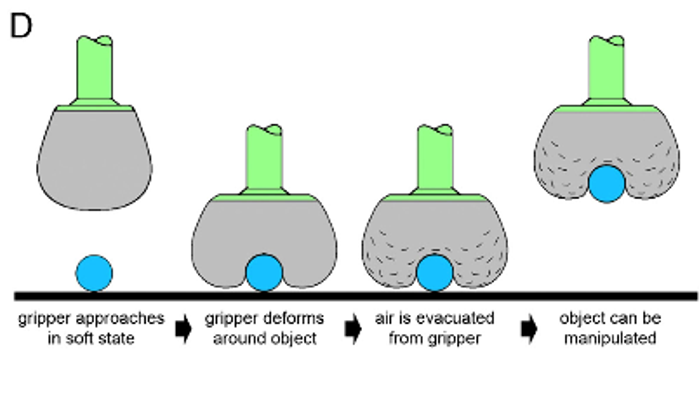
When the gripper needs to pick up an object, a vacuum contracts the granular material and hardens quickly to pinch and hold the object without requiring sensory feedback. Volume changes of less than 0.5% are enough to grip objects reliably and hold them with forces exceeding many times their weight.
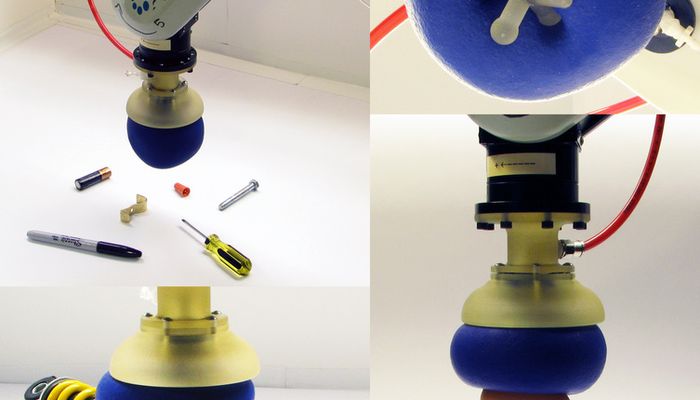
The gripper is made of a single non porouselastic bag filled with granular matter. This system gives a robotic hand an infinitely many degrees of freedom, which are actuated passively by contact with the surface of the object to be gripped. It's locked in place by a single active element, a pump that evacuates the bag.
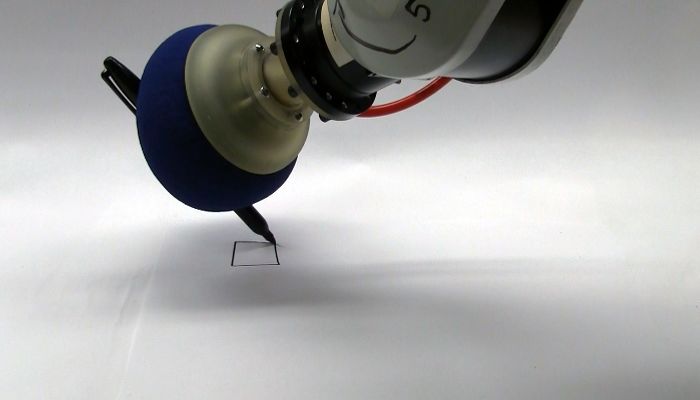
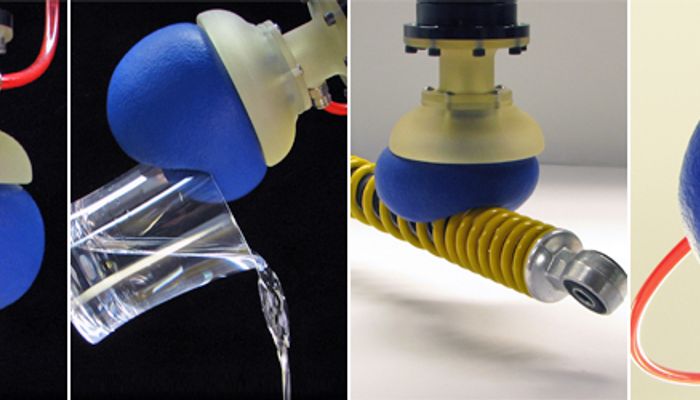
A wide range of different types of objects can easily be handled in pick-and-place operations using the fixed-base robotic arm, without the need to reconfigure the gripper or even position it precisely, as long as it can cover a fraction of a targetobject’s surface. This also enables switching between objects of different shapes, items which are difficult to pick up with conventional universal grippers, or fragile objects. It can also perform ssimple manipulation tasks, such as pouring water from a glass or drawing with a pen.
Ground coffee was chosen as the grain material for this gropper becauseof its performance in jamming hardness tests. The relatively low density of ground coffee is also advantageous, as it can be used to fill relatively large grippers without weighing them down and straining the membrane.
References
Describes the concept of the project, the development, and workings. The document has a result and discussion section.



Continue Reading

Understanding the inception, evolution, composition, and types of pick and place robots and their impact on various industrial sectors


Kuźnia Polska, in cooperation with ASTOR, Kawasaki Robotics CEE Hub, and Photoneo, developed an automation solution for a bin picking application that enables the picking of two types of parts from two different containers.

2 minutes read
Randomly arranged objects of irregular shapes, made of flexible materials that are easily deformable, wrinkled, and thus difficult to localize? This is now a problem of the past.
2 minutes read
