Researchers Create Robots That Withstand Shock Loads
An ITMO PhD student has devised a way to design flexible robots capable of withstanding a shock load, retaining its energy, and adapting to movement on rough surfaces. The new robot’s joints are connected by flexible hinges rather than turning kinematic pairs.
23 Sep, 2024. 3 minutes read
Egor Rakshin. Photo courtesy of the subject
This article was first published on
news.itmo.ruAn ITMO PhD student has devised a way to design flexible robots capable of withstanding a shock load, retaining its energy, and adapting to movement on rough surfaces. The new robot’s joints are connected by flexible hinges rather than turning kinematic pairs. With such mechanisms, it’s possible to increase the capabilities of robots that interact with their environments: quadrupeds, anthropomorphic robots, and collaborative manipulators. The new design will be unveiled at the International Conference on Intelligent Robots and Systems (IROS 2024).
Roboticists from ITMO’s Research Center “Strong AI in Industry” have devised a method of optimizing a robot’s mechanical structure and movement trajectory to provide the necessary dynamic behavior. In order to test the method, ITMO PhD student Egor Rakshin has assembled a robot with flexible joints – its improved mechanism is impact-robust and can function even with insufficient information about its environment.
When assembling the new model, the researchers used the one previously developed under the supervision of Prof. Ivan Borisov from ITMO’s Faculty of Control Systems and Robotics. In the previous version, mobility was provided by bearings, making the structure more rigid and less mobile; during a fall, part of the impact energy was dissipated through plastic deformation of the solid links.
In the new version, the authors moved away from turning kinematic pairs with bearings in favor of flexible joints – they function as a passive suspension that absorbs the entire impact during the robot’s fall and protects drive gearboxes and rigid links from deformation. Additionally, the new design allows for recuperation, that is, recovering part of the energy dissipated during impact, as well as softening peak shock loads on the drives. Thanks to this, it may be possible to lower the requirements for the robot’s components and increase its energy efficiency.
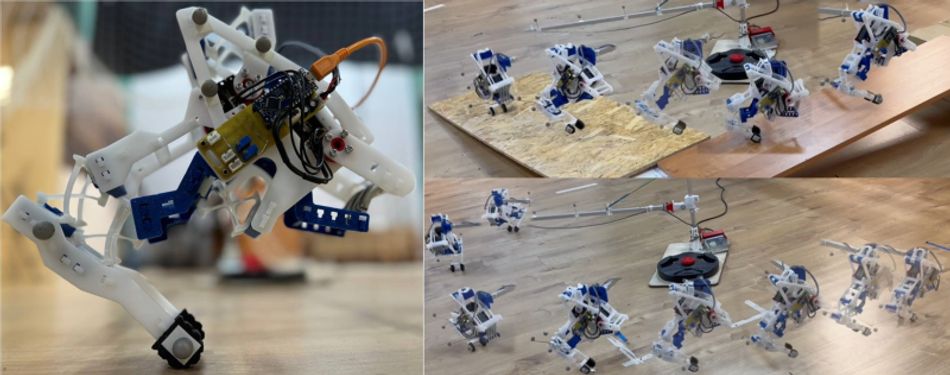
In order to test the mechanism’s capacity to absorb shock loads, the researchers threw the robot from a meter’s height and hit it with a football. None of these impacts caused harm: during a fall, the robot “bounced” off the floor and continued its movement undisturbed.
“Our robot performs well under shock loads and can function in unstructured environments – even on unknown terrain, moving blindly. Thanks to its flexible joints, the structure can move along rough surfaces without a complex feedback system. With this design approach, we will be able to extend the endurance of walking robots and manipulators that have to interact with environments to perform their functions. Currently, the mechanism is a prototype of a single leg that can be used to assemble a quadruped (for example, a robotic cheetah) capable of covering longer distances thanks to energy recuperation,” shares the paper’s first author Egor Rakshin, a PhD student and engineer at ITMO’s Laboratory of Biomechatronics and Energy-Efficient Robotics.

In the future, the researchers are planning to use the new method to create new robots (quadrupeds, bipeds, and hybrid locomotion robots), including those for logistics and industrial inspection.
The talk Parametric Synthesis of Compliant Joints for Impact-Robust Shaftless Leg Mechanisms will be delivered for the first time at IROS 2024, a major robotics conference organized since 1988.
1,587 presentations from all over the world will be held at the conference, including three from ITMO’s Faculty of Control Systems and Robotics, thus making the total of 12 IROS-accepted works by ITMO researchers over the years (in 2016, 2019, 2021, 2023, and 2024).
IROS is included in the CORE conference ranking, where it is ranked A (one of the most prestigious positions). In 2024, the event will be held in Abu Dhabi on October 14-18. IROS aims to introduce the international community of robotics researchers to the latest cutting-edge findings in intelligent robots and machines.