Revolutionizing Robotics: The Future of Dexterous Manipulation with Multifingered Robot Hands
A look at the latest research advancing robotic dexterity with human-guided learning control for multi-fingered robot hands.

17 Jan, 2024. 3 minutes read
A primary objective in the field of robotic manipulation is to equip robots with dexterity and compliance akin to human abilities, particularly for a variety of everyday tasks. Recent years have seen numerous efforts directed towards this aim. However, several challenges remain unresolved, notably in the areas of grasping and manipulating objects using robots with multiple fingers. A significant development, as presented in the paper "Multifingered Robot Hand Compliant Manipulation Based on Vision-Based Demonstration and Adaptive Force Control," marks a significant leap in this pursuit. The research was conducted by researchers from the University of West England using the Shadow Robot, Shadow Hand.
Learning-control mechanism integrating human input
The researchers present a novel approach, merging human interaction with robotic learning and control. This innovative method blends a vision-based teleoperation system with adaptive force control, enabling the conversion of image inputs into precise force commands for a robotic hand.
For the learning aspect, the team developed a unique end-to-end neural network, specifically designed to understand the relationship between human hand positions and the joint movements of a robotic hand. During operation, a camera captures a depth image of the hand, and this network, referred to as "TeachNet," calculates the optimal joint angles for the robot based on this image.
To address the dynamic challenges of hand grasping and manipulation, the team engineered an adaptive force control strategy. This strategy is capable of predicting subsequent control commands based on the desired joint angles and the current state of the robot. The foundation of their force control system is a computational model inspired by human motor learning principles. The controller adjusts control variables like impedance and feedforward terms in real-time, combining them to generate force and torque commands that are then relayed to the robot hand in its joint space.
The research team's work stands out due to several key innovations and contributions. First, they developed a human-guided, markerless, vision-based teleoperation system specifically for robotic hand demonstrations. In conjunction with this system, they trained an end-to-end neural network to map the poses from a human hand to a robotic hand. Secondly, they introduced an impedance-based force control strategy, seamlessly integrated into the teleoperation system. This strategy allows for the generation of desired force control commands by analyzing the differences in current hand poses. This approach facilitates more compliant manipulation behaviors compared to the commonly used position control methods in this field.
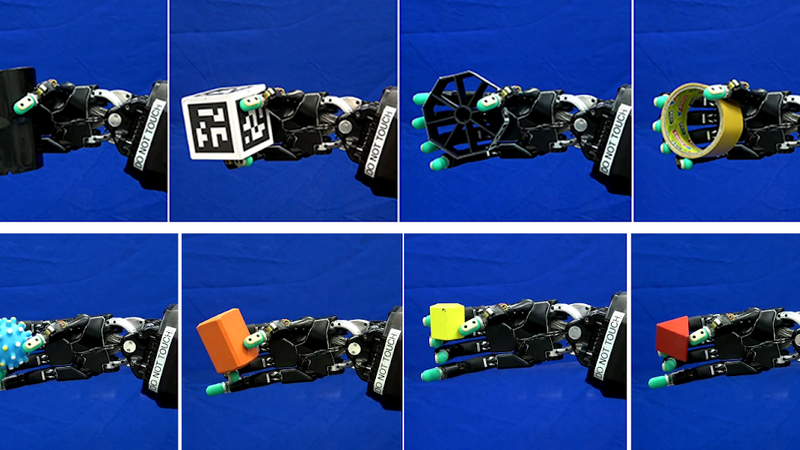
Thirdly, the researchers rigorously tested their approach in both simulated and real-world settings across various task types. It is noteworthy that their work is among the few that have successfully implemented adaptive force control in a tendon-driven, multi-fingered robotic hand, such as the Shadow Hand, for the learning of compliant skills. This achievement marks a significant advancement in the realm of robotic manipulation.
Real world tests and applications
The application of this research is not confined to the lab. Its effectiveness has been proven in both simulation and real-world scenarios using the Shadow Hand. This is not just about surpassing traditional position control methods; it's about redefining what is possible in compliant grasping and manipulation behaviors.
As engineers and technologists, this research offers a glimpse into a future where robots are not just tools, but extensions of our human capabilities. The precision, adaptability, and sensitivity of the multi-fingered robot hand open new horizons in various fields, from medical robotics to industrial automation.
This breakthrough is a clarion call to engineers and roboticists: the future of robotics is here, and it is more dexterous, compliant, and human-like than ever before. The marriage of human intuition and robotic precision in this research paves the way for innovations that we have only begun to imagine. The multifingered robot hand is not just a technological achievement; it's a beacon of the limitless potential of human-robot collaboration.
Read the full paper at https://pubmed.ncbi.nlm.nih.gov/35767493/
Shadow Robot: Empowering cutting-edge robotic research
For over twenty years, Shadow Robot has been deeply invested in research, forming the core of its mission. The company has engaged in collaborations with both the academic community and research-focused corporations, addressing practical challenges in various industry sectors. Their work has spanned the development and application of artificial intelligence, machine learning, and mobile manipulation technologies.
Their research partner shop program offers universities and labs the chance to use their robots to make a significant impact. Shadow Robot supports researchers by offering discounted technology, In-depth market knowledge and industry insights, a strong network of thought leaders, smart robotics engineering (from mechanical to software and a passion for robots that solve a solution or provide a meaningful purpose.
Get in touch with Shadow Robot to learn more about the ways they support the work of researchers.

Sponsored this article
About Shadow Robot
Shadow applied robotics technology to solve real-world problems for people. We're best known for designing and manufacturing state-of-the-art anthropomorphic robot hands. We have a wealth of...
4 Posts