Robot Actuators: A Comprehensive Guide to Types, Design, and Emerging Trends
Robotic actuators stand at the forefront of technological innovation, transforming energy into motion to breathe life into robots, enhancing their capabilities in an ever-evolving landscape of industrial automation.

Last updated on 04 Dec, 2023. 21 minutes read
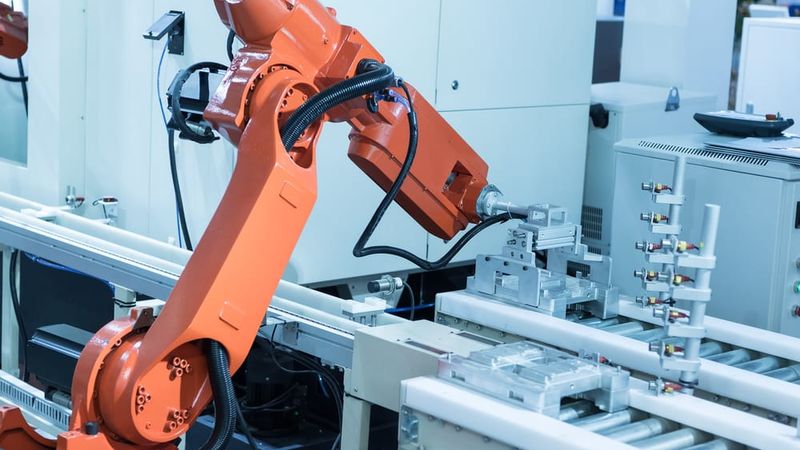
Robotic actuators are the muscle power of Industry 4.0
Introduction to Robotic Actuators
Robotic actuators are the "muscles" of a robot, the parts which convert stored energy into movement. They are an integral part of any robotic system. Actuators are typically powered by air, electricity, or liquids. The type of actuator used can greatly affect the performance and efficiency of the robot.
In the field of robotics, actuators play a crucial role. They are responsible for making the robot move, whether it's a simple movement like the rotation of a joint or more complex like walking or grabbing objects. Their versatility allows for a wide range of applications, from industrial automation to sophisticated humanoid robots. Without actuators, robots would be static and incapable of any movement or action.
The importance of robotic actuators extends beyond just movement. Modern actuators are increasingly integrated with sensors and control systems, enhancing their ability to operate autonomously and intelligently in dynamic environments. They also contribute to the robot's ability to interact with its environment. For instance, a robotic arm used in a manufacturing plant needs to move accurately and smoothly to pick up and place items. This precision is achieved through the use of high-quality actuators.
In essence, robotic actuators bring robots to life. They are the bridge between the command signals that a robot receives and the physical actions that it performs. Understanding robotic actuators, their types, and their working principles is fundamental to the field of robotics.
This comprehensive article delves into the fascinating world of robotic actuators, exploring their essential role as the dynamic "muscles" of robots. It offers an in-depth look at various types of actuators, their operating principles, and how they impact robot performance and efficiency. Additionally, the article sheds light on the latest technological advancements and trends, highlighting the future possibilities in robotics and automation.
The Role of Actuators in Robotics
In the realm of robotics, actuators hold a pivotal role. They are the components that enable robots to interact with their environment by converting energy into motion. This conversion process is what allows robots to perform tasks ranging from simple to complex.
Actuators are the driving force behind a robot's ability to move. They are the components that receive signals from the robot's control system and execute the corresponding physical movement. This could be as simple as turning a wheel or as complex as coordinating the movements of a multi-jointed robotic arm.
The role of actuators extends beyond just movement. They also contribute to the robot's ability to sense and respond to its environment. For instance, in a robotic arm used in a manufacturing plant, the actuators not only enable the arm to move, but also provide feedback to the control system about the arm's position and movement. This feedback, known as proprioceptive information, is crucial for the robot to perform precise and accurate movements.
The type of actuator used can greatly affect the performance and efficiency of the robot. For example, electric actuators, which convert electrical energy into mechanical motion, are known for their high speed and precision. They are commonly used in robots that require fast, accurate movements, such as those used in assembly lines or for surgical procedures.
On the other hand, hydraulic actuators, which use pressurized fluid to create motion, are known for their high force and power. They are often used in robots that need to perform heavy-duty tasks, such as those used in construction or industrial automation settings.
Pneumatic actuators, which use compressed air to generate motion, offer advantages in terms of simplicity, light weight, and low cost. They are often used in robots that perform simple, repetitive tasks, such as those used in packaging or sorting operations.
Further reading: What is an Actuator? Types, Principles, and Applications
Types of Robotic Actuators
In the world of robotics, there are several types of actuators, each with its unique characteristics and applications. The choice of actuator can significantly influence a robot's performance, efficiency, and suitability for a particular task.
Electric Actuators
Electric actuators are a type of actuator that convert electrical energy into mechanical motion. They are among the most commonly used actuators in robotics due to their high speed, precision, and ease of control.
The working principle of an electric actuator is based on the use of an electric motor. The motor generates rotary motion, which is then converted into linear motion or other forms of motion through a series of mechanical components such as gears, belts, or screws. Electric motors serve as the foundation for both linear actuators and rotary actuators. For instance, DC motors, including stepper motors and servo motors, are widely used in various robotic configurations due to their reliability. However, certain applications may require alternative motor types for specific needs. Additionally, brushless DC motors are frequently chosen for their efficiency and extended operational lifespan, making them a popular choice in numerous applications.
Further reading: Stepper vs Servo Motors: A Comprehensive Comparison for Your Next Project
One of the key advantages of electric actuators is their precision. They can be controlled very accurately, allowing for precise movements and positioning. This makes them ideal for tasks that require a high degree of accuracy, such as positioning a robotic arm or controlling a surgical robot.
Electric actuators also offer high speed. They can move quickly and smoothly, making them suitable for tasks that require fast movements. For example, in an assembly line, an electric actuator could be used to quickly and accurately move parts into position.
Another advantage of electric actuators is their ease of control. They can be easily integrated with electronic control systems, allowing for sophisticated control strategies and feedback mechanisms. PWM (Pulse Width Modulation) is one of the techniques used to control motors that offers great precision. Depending on the requirements and available resources, more sophisticated control schemes can be employed. This makes them highly adaptable and versatile, capable of performing a wide range of tasks.
Further reading: Microcontroller Programming: Mastering the Foundation of Embedded Systems
However, electric actuators also have some limitations. They typically require a power source, such as a battery or a connection to the electrical grid. They can also generate heat during operation, which can be a challenge in certain applications.
Despite these challenges, electric actuators remain a popular choice in robotics due to their many advantages. They are a key component in many types of robots, from industrial robots to surgical robots, and continue to be a focus of research and development in the field of robotics.
Hydraulic Actuators
Hydraulic actuators are a type of actuator that use pressurized fluid to create motion. They are known for their high force and power, making them suitable for heavy-duty tasks in robotics.
The working principle of a hydraulic actuator is based on Pascal's law, which states that pressure applied at any point in a confined incompressible fluid is transmitted equally in all directions. In a hydraulic actuator, a pump pressurizes a fluid (usually oil), which is then used to move a piston. The movement of the piston can then be used to create linear or rotary motion.
One of the key advantages of hydraulic actuators is their high force and power. They can generate significant force, making them ideal for tasks that involve heavy lifting or large forces. For example, a hydraulic actuator could be used in a robotic arm designed for heavy lifting or demolition work.
Hydraulic actuators also offer high durability and robustness. They can withstand harsh conditions and heavy loads, making them suitable for use in challenging environments such as construction sites or industrial settings.
However, hydraulic actuators also have some limitations. They require a hydraulic system, which can be complex and require maintenance. They can also be slower and less precise than other types of actuators, such as electric actuators.
Despite these challenges, hydraulic actuators are a valuable tool in robotics. They offer high power and durability, making them suitable for a range of heavy-duty tasks. Understanding the working principles and applications of hydraulic actuators is crucial for anyone involved in the design or operation of robots.
Pneumatic Actuators
Pneumatic actuators are a type of actuator that use compressed air to generate motion. They offer advantages in terms of simplicity, light weight, and low cost, making them suitable for a range of applications in robotics.
The working principle of a pneumatic actuator is based on the use of compressed air. When the air is released, it expands and pushes against a piston or diaphragm, creating motion. This motion can then be used to perform a variety of tasks, from moving a robotic arm to driving a wheel.

One of the key advantages of pneumatic actuators is their simplicity. They have fewer moving parts than other types of actuators, such as electric or hydraulic actuators, making them easier to maintain and less prone to mechanical failure. This makes them a popular choice for applications that require reliability and low maintenance.
Pneumatic actuators are also lightweight and inexpensive. They use air, which is readily available and inexpensive, as their power source. This makes them a cost-effective choice for many applications, particularly those that require simple, repetitive movements.
However, pneumatic actuators also have some limitations. They are less precise than other types of actuators, such as electric actuators, and they require a source of compressed air, which can add complexity to the robot's design.
Despite these challenges, pneumatic actuators are a valuable tool in robotics. They offer a combination of simplicity, reliability, and cost-effectiveness that makes them suitable for a wide range of applications. Understanding the working principles and applications of pneumatic actuators is crucial for anyone involved in the design or operation of robots.
Each type of actuator has its strengths and weaknesses, and the choice of actuator can greatly affect the performance and capabilities of a robot. Therefore, understanding the different types of robotic actuators and their applications is crucial for anyone involved in the design, construction, or operation of robots.
Further reading: The Ultimate Pneumatics Guide
Actuator Dynamics and Kinematics
Actuator dynamics involves the study of forces and torques and how they influence the motion of actuators. In hydraulic and pneumatic actuators, for instance, fluid dynamics plays a critical role. The pressure, flow rate, and fluid compressibility must be meticulously balanced to achieve the desired motion. Similarly, in electric actuators, the interplay between electrical currents, magnetic fields, and mechanical forces needs careful consideration to optimize performance.
Kinematics, the study of motion without considering the forces that cause it, is equally vital. It involves analyzing the possible movements of an actuator, determining velocity, acceleration, and positional accuracy. This analysis is essential for applications where precise movements are crucial, such as in robotic arms used in manufacturing or surgery.
Actuator Performance Metrics
When selecting an actuator for a robotic application, it is essential to consider various performance metrics. These metrics help determine the suitability of an actuator for a specific task and ensure that the robot operates efficiently and effectively.
- Force and Torque are fundamental performance metrics for actuators. Force refers to the linear force exerted by an actuator, while torque refers to the rotational force. The required force or torque depends on the application and the load that the actuator needs to handle. For example, a robotic arm used for heavy lifting would require an actuator with a high force or torque rating.
- Speed and Response Time are crucial for many robotic applications. Speed refers to how quickly an actuator can move, while response time refers to the time it takes for the actuator to react to a control signal. Faster actuators are necessary for applications that require quick movements, such as assembly lines or pick-and-place tasks.
- Accuracy and Precision are essential for tasks that require exact positioning or movement. Accuracy refers to how closely an actuator can achieve a desired position, while precision refers to the repeatability of the actuator's movements. High accuracy and precision are necessary for applications such as robotic surgery or precision assembly tasks.
- Efficiency is a measure of how effectively an actuator converts energy into motion. Higher efficiency actuators consume less energy and generate less waste heat, making them more suitable for applications where energy consumption is a concern.
- Durability and Reliability are important factors to consider when selecting an actuator. Durable actuators can withstand harsh conditions and heavy loads, while reliable actuators have a low failure rate and require minimal maintenance.
- Size and Weight can also be critical factors, especially in applications where space is limited or the robot needs to be lightweight. Smaller, lighter actuators are often preferred for these applications, as they can help reduce the overall size and weight of the robot.
By considering these performance metrics, engineers and designers can select the most appropriate actuator for a specific robotic application. This ensures that the robot operates efficiently and effectively, ultimately leading to better performance and a higher return on investment.
Design and Construction of Robotic Actuators
The design and construction of robotic actuators involve several key steps and considerations. The process typically begins with the identification of the requirements for the actuator, followed by the selection of the appropriate type of actuator, the design of the actuator, and finally, the construction and testing of the actuator.
- Identifying Requirements is the first step in the design and construction of a robotic actuator. This involves understanding the task that the robot will perform and the performance metrics that the actuator needs to meet. For example, if the robot is to perform heavy lifting, the actuator would need to have a high force or torque rating. If the robot needs to perform precise movements, the actuator would need to have high accuracy and precision.
- Selecting the Type of Actuator is the next step. This involves choosing between electric, hydraulic, and pneumatic actuators, among others. The choice depends on the requirements identified in the previous step. For example, if high speed and precision are required, an electric actuator might be the best choice. If high force is required, a hydraulic actuator might be more suitable.
- Designing the actuation system involves creating a detailed design of the actuator based on the selected type and the identified requirements. This includes designing the mechanical components of the actuator, such as the motor or pump, the transmission mechanism, and the output mechanism. It also includes designing the control system for the actuator, which could involve electronics and software.
- Constructing the Actuator involves building the actuator based on the design. This includes manufacturing or sourcing the mechanical components, assembling the actuator, and installing the control system. It also includes testing the actuator to ensure that it meets the performance metrics.
- Testing the Actuator is the final step in the design and construction process. This involves operating the actuator and measuring its performance to ensure that it meets the requirements. If the actuator does not meet the requirements, the design may need to be revised and the actuator reconstructed.
The design and construction of robotic actuators is a complex process that requires a deep understanding of mechanics, electronics, and control systems. It also requires a systematic approach to ensure that the actuator meets the requirements and performs effectively in the robot.
Material Selection for Actuators
The performance, durability, and efficiency of actuators are heavily influenced by the materials used in their construction. Innovations in materials, such as high-strength alloys, advanced polymers, and composites, have led to actuators that are lighter, stronger, and more resilient. These materials can withstand extreme temperatures, corrosive environments, and high stress, expanding the range of applications where actuators can be effectively used.Different materials have unique properties that make them suitable for specific applications and environments.
- Metals are commonly used in the construction of actuators due to their strength, durability, and ability to withstand large forces and temperatures. Common metals used in actuators include steel, aluminum, and brass. Steel is known for its high strength and durability, making it suitable for heavy-duty applications. Aluminum is lighter than steel and offers a good strength-to-weight ratio, making it ideal for applications where weight is a concern. Brass is often used for its corrosion resistance and machinability, making it suitable for components such as valves and fittings.
- Plastics are also used in the construction of actuators, particularly for lightweight and low-cost applications. Plastics such as polyamide (nylon), polyoxymethylene (POM), and polytetrafluoroethylene (PTFE) are commonly used due to their low friction, wear resistance, and self-lubricating properties. These materials can be used for components such as gears, bearings, and seals, reducing the need for additional lubrication and maintenance.
- Composites are materials made from two or more different materials, combining their properties to create a material with improved characteristics. Composites such as carbon fiber reinforced polymers (CFRP) and glass fiber reinforced polymers (GFRP) are used in actuators for their high strength-to-weight ratio and stiffness. These materials can be used to create lightweight and strong components, such as casings and structural elements.
- Elastomers are used in actuators for their flexibility, elasticity, and ability to absorb shock and vibration. Materials such as silicone, rubber, and polyurethane are commonly used for seals, gaskets, and diaphragms in actuators. These materials help to prevent leaks and maintain the integrity of the actuator's internal components.
When selecting materials for an actuator, it is essential to consider factors such as the required performance metrics, the operating environment, and the cost of the materials. By carefully selecting the appropriate materials, engineers and designers can create actuators that are efficient, durable, and capable of meeting the demands of their intended applications.
Designing for Efficiency and Performance
Designing for efficiency and performance is a critical aspect of creating robotic actuators. This involves optimizing the design to maximize the actuator's performance while minimizing energy consumption and waste.
- Optimizing Mechanical Design is a key part of this process. This involves selecting the right type of actuator for the task, designing the mechanical components to handle the required forces and movements, and arranging the components in a way that minimizes energy loss. For example, using a direct drive mechanism can eliminate energy losses associated with gears or belts, while using lightweight materials can reduce the energy required to move the actuator.
- Optimizing Control Systems is another important aspect of designing for efficiency and performance. This involves designing the electronics and software that control the actuator to maximize performance and minimize energy consumption. For example, using advanced control algorithms can improve the actuator's response time and accuracy, while using energy-efficient electronics can reduce the power consumption of the control system.
- Minimizing Energy Loss is a critical part of designing for efficiency. This involves identifying and minimizing sources of energy loss in the actuator, such as friction, heat, and electrical losses. For example, using low-friction materials and bearings can reduce energy loss due to friction, while using efficient motors and electronics can reduce electrical losses.
- Maximizing Performance involves optimizing the actuator to meet the required performance metrics. This could involve increasing the force or speed of the actuator, improving its accuracy and precision, or enhancing its durability and reliability. For example, using high-strength materials and robust design principles can increase the actuator's force and durability, while using precise manufacturing techniques and advanced control systems can improve its accuracy and precision.
By designing for efficiency and performance, engineers and designers can create robotic actuators that perform effectively and efficiently, meeting the demands of their intended applications while minimizing energy consumption and waste. This not only improves the performance of the robot but also reduces its operating costs and environmental impact.
Advanced Robotic Actuators
Advanced robotic actuators represent the cutting edge of actuator technology, incorporating innovative designs and materials to achieve superior performance and efficiency. These actuators often leverage advancements in fields such as materials science, electronics, and control systems to push the boundaries of what is possible in robotic motion.
- Smart Materials Actuators utilize materials that respond to external stimuli, such as electric fields or temperature changes, with a change in shape or size. One example is piezoelectric materials, which deform in response to an electric field, allowing for precise, high-speed movements. Another example is shape-memory alloys, which can return to a predefined shape when heated, allowing for complex movements without the need for complex mechanical systems.
- Soft Actuators represent a significant departure from traditional rigid actuators. These actuators use flexible, compliant materials to achieve movements, often inspired by biological systems. For example, pneumatic artificial muscles (PAMs) contract when pressurized, similar to biological muscles. Soft actuators can adapt to their environment and handle delicate objects, making them ideal for applications such as human-robot interaction and manipulation of fragile objects.
- Energy-Efficient Actuators focus on maximizing the conversion of energy into motion, minimizing waste. This can involve the use of high-efficiency motors, advanced control algorithms to optimize energy use, and designs that minimize energy loss due to factors like friction and heat. For example, regenerative drive systems can recapture energy during deceleration or downward movement and feed it back into the system, improving overall efficiency.
- High-Power Density Actuators aim to deliver high force or torque in a compact package. This often involves the use of advanced materials and designs to maximize the force or torque produced per unit of volume or weight. For example, some actuators use high-energy magnets and dense coil/solenoid windings to achieve high torque in a small package.
- Multi-Functional Actuators combine actuation with other functions, such as sensing or energy storage, in a single device. This can simplify the design of the robot and improve its performance by integrating functions closely. For example, some actuators incorporate sensors to measure parameters like position, force, or temperature, allowing for better control and feedback.
Further reading: What is a Sensor? An In-Depth Exploration and Comprehensive Guide to Engineering Principles and Applications
Advanced robotic actuators are pushing the boundaries of what is possible in robotics, enabling new capabilities and applications. By leveraging advancements in materials, design, and control systems, these actuators are helping to drive the future of robotics.
Smart Actuators
Smart actuators are a category of advanced robotic actuators that leverage the properties of smart materials to achieve precise and responsive movements. These materials respond to external stimuli, such as electric fields, temperature changes, or light, with a change in shape, size, or other physical properties.
- Piezoelectric Actuators are a type of smart actuator that uses piezoelectric materials, which deform in response to an electric field. This deformation can be precisely controlled, allowing for high-speed, accurate movements. For example, piezoelectric actuators can achieve nanometer-level precision, making them ideal for applications such as micro-manipulation or precision positioning in manufacturing and medical devices.
- Shape-Memory Alloy Actuators use shape-memory alloys (SMAs), which can return to a predefined shape when heated. This allows for complex movements without the need for complex mechanical systems. SMAs can generate high forces relative to their size, making them suitable for compact, lightweight actuators. However, the speed of SMA actuators is limited by the rate of heating and cooling, which can be a challenge in high-speed applications.
- Electroactive Polymer Actuators use electroactive polymers (EAPs), which change shape in response to an electric field. EAPs can achieve large deformations, making them suitable for soft robotics applications. They can also operate silently and require low voltages, making them ideal for consumer electronics and haptic feedback devices.
- Magnetostrictive Actuators use magnetostrictive materials, which change shape in response to a magnetic field. These actuators can generate high forces and achieve high precision, making them suitable for applications such as precision positioning and active vibration control.
- Photomechanical Actuators use photomechanical materials, which change shape in response to light. These actuators can achieve fast, remote actuation, making them suitable for applications such as micro-robotics and lab-on-a-chip devices.
Smart actuators represent a significant advancement in actuator technology, offering new capabilities and performance characteristics. By leveraging the unique properties of smart materials, these actuators can achieve precise, responsive movements, opening up new possibilities in robotics and other fields.
Soft Robotic Actuators
Soft robotic actuators represent a significant shift from traditional rigid actuators. These actuators leverage the properties of flexible and compliant materials to achieve movements that are often inspired by biological systems. The inherent flexibility and adaptability of these actuators make them ideal for a range of applications, from handling delicate objects to navigating unstructured environments.

- Pneumatic Artificial Muscles (PAMs) are a type of soft actuator that contract when pressurized, similar to biological muscles. PAMs can generate high forces relative to their weight and size, and their soft, compliant nature allows them to adapt to the shape of the object they are interacting with. This makes PAMs ideal for applications such as prosthetics and wearable robotics, where a soft touch and adaptability are crucial.
- Dielectric Elastomer Actuators (DEAs) are another type of soft actuator that use dielectric elastomers, a type of electroactive polymer, to achieve movement. When a voltage is applied, the elastomer changes shape, allowing for actuation. DEAs can achieve large strains and operate silently, making them suitable for applications such as haptic devices and soft grippers.
- Hydraulic Actuators in soft robotics use fluid pressure to achieve movement. These actuators can generate high forces and are highly scalable, making them suitable for a range of applications, from micro-robots to large-scale robotic systems. The fluid used in hydraulic actuators can also serve as a cooling medium, helping to manage heat in the actuator.
- Ionic Polymer-Metal Composite (IPMC) Actuators are a type of soft actuator that uses ionic polymer-metal composites, a type of electroactive polymer, to achieve movement. When a voltage is applied, ions within the polymer migrate, causing the polymer to bend. IPMC actuators can operate at low voltages and achieve large bending motions, making them suitable for applications such as micro-robotics and bio-inspired robots.
Soft robotic actuators are pushing the boundaries of what is possible in robotics, enabling new capabilities and applications. Their inherent flexibility and adaptability open up new possibilities for interaction with the environment and handling of delicate or complex objects. As research and development in this field continue, we can expect to see even more innovative applications of soft robotic actuators.
Further reading: Powering Soft Robotics: A Deeper Look at Soft Robotics Actuators
Case Study: Use of Robotic Actuators in the Automotive Industry
The automotive industry, renowned for its high-volume and high-quality production standards, provides an excellent case study for the application of robotic actuators. Actuators play a pivotal role in various stages of automotive manufacturing, from assembly lines to quality control. This section explores the diverse applications of robotic actuators in the automotive industry.
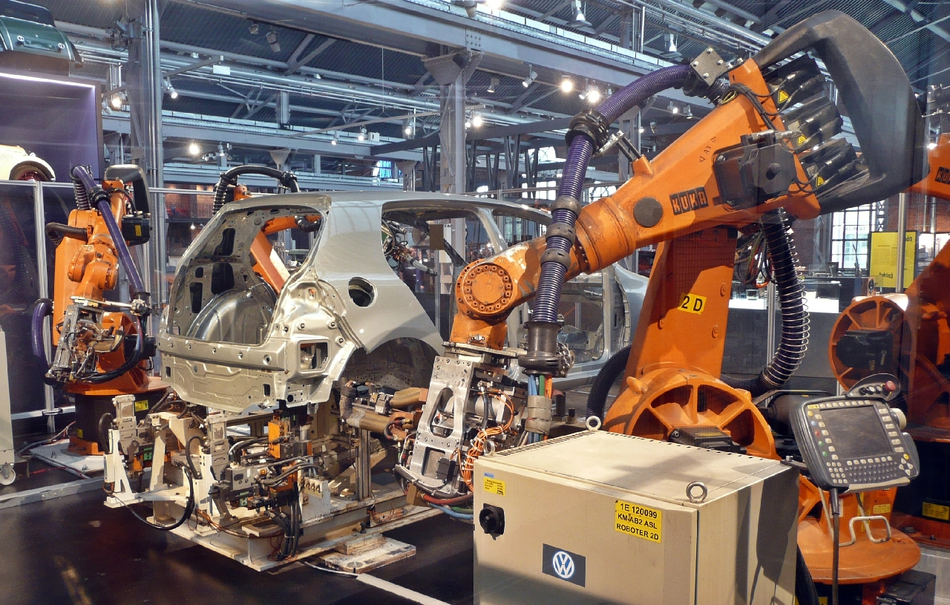
Assembly Line Robots
- Welding Operations: Electric and pneumatic actuators control robotic arms for precise and speedy welding, a core aspect of car manufacturing.
- Painting Robots: Electric actuators guide robots for uniform paint application, adapting to different vehicle contours.
- Part Installation: Hydraulic actuators, known for high force, assist in installing heavy components like windshields and doors.
Quality Control and Inspection
- Vision System Integration: Precision actuators position sensors and cameras for detailed inspection of welds and paint, ensuring consistent quality.
- Testing and Simulation: Electric actuators facilitate durability testing, replicating real-world conditions to test component robustness.
Material Handling and Logistics
- Part Feeding and Handling: Pneumatic actuators excel in repetitive tasks, moving parts between production stages.
- Loading and Unloading: Hydraulic actuators handle heavy loads, crucial for transporting substantial components like engine blocks.
Customization and Flexible Manufacturing
- Adaptive Production Lines: Electric actuators enable reprogrammable, flexible robots for varied vehicle models.
- Collaborative Robots (Cobots): Employed alongside human workers, these use electric and pneumatic actuators for safe and precise assistance. They have multiple built-in safety measures crucial to halt the system in case of .
Maintenance and Energy Efficiency
- Energy-Efficient Actuators: The industry increasingly adopts electric actuators for energy conservation and operational cost reduction.
- Predictive Maintenance: Smart actuators with integrated sensors aid in predictive maintenance, preventing downtime.
Future Trends and Research Directions
As we stand at the cusp of technological advancements, the future of actuators is bright with possibilities and potential. This section provides an overview of emerging trends in actuator technology and highlights the areas ripe for research and development.
- Emerging Trends in Actuators: The current trends point towards further miniaturization, increased efficiency, and the integration of smart materials. The concept of 'nano-actuators', operating at a nanoscale, promises unprecedented precision and applications in fields like nanotechnology and molecular biology. Additionally, there's a growing focus on developing actuators that are energy autonomous, capable of harvesting energy from their environment, further reducing their carbon footprint and enhancing sustainability.
- Potential Research Areas: One of the most promising areas of research is in the field of bio-inspired actuators. These actuators, drawing inspiration from natural biological systems, could lead to breakthroughs in creating devices that mimic the versatility and adaptability of muscle movement. Another significant area is the integration of artificial intelligence and machine learning algorithms with actuators, paving the way for systems that can learn and adapt in real-time to changing conditions.
- Future Applications: Looking ahead, the potential applications of advanced actuators seem boundless. In medicine, for instance, micro-actuators could revolutionize drug delivery systems, enabling targeted therapy at the cellular level. In robotics, the continuous improvement of actuator technologies is expected to enhance the capabilities of humanoid robots, making them more adept at navigating and interacting in human environments.
The future will likely see actuators becoming more integrated, intelligent, and energy-efficient. The convergence of various scientific disciplines – material science, electronics, computer science, and biomechanics – is expected to drive this evolution, leading to actuators that are not only functionally advanced but also more in tune with their environment and application needs.
Conclusion
Robotic actuators play a crucial role in the field of robotics, enabling robots to move, interact with their environment, and perform a wide range of tasks. Understanding the different types of actuators, their working principles, and their applications is essential for anyone involved in the design, construction, or operation of robots. Advanced robotic actuators, such as smart actuators and soft robotic actuators, are pushing the boundaries of what is possible in robotics, opening up new possibilities and applications.
By considering factors such as performance metrics, material selection, and design for efficiency and performance, engineers and designers can create actuators that meet the demands of their intended applications while minimizing energy consumption and waste.
Frequently Asked Questions (FAQs)
1. What are the main types of robotic actuators?
The main types of robotic actuators are electric, hydraulic, and pneumatic actuators. Each type has its unique characteristics and applications, depending on factors such as required force, speed, precision, and operating environment.
2. What are the key performance metrics for robotic actuators?
Key performance metrics for robotic actuators include force and torque, speed and response time, accuracy and precision, efficiency, durability and reliability, and size and weight.
3. What are some examples of advanced robotic actuators?
Examples of advanced robotic actuators include smart actuators, which use smart materials to achieve precise and responsive movements, and soft robotic actuators, which use flexible and compliant materials to achieve movements inspired by biological systems.
4. How do I choose the right actuator for my robotic application?
To choose the right actuator for your robotic application, consider factors such as the required performance metrics, the operating environment, and the cost of the materials. By carefully selecting the appropriate type of actuator and optimizing the design for efficiency and performance, you can create a robotic system that meets the demands of your intended application.
5. What are some challenges and future directions in robotic actuators?
Challenges in robotic actuators include improving efficiency, reducing energy consumption, and developing new materials and designs that enable new capabilities and applications. Future directions in robotic actuators may involve the development of more advanced smart actuators, soft robotic actuators, and energy-efficient actuators, as well as the integration of sensing and energy storage functions into actuators.
6. What role do robotic actuators play in the field of artificial intelligence and machine learning?
In AI and machine learning, robotic actuators are crucial for providing physical interaction capabilities. They enable robots to learn from and adapt to their environment by executing physical tasks, which is fundamental in robotics research and AI development.
7. Are there any emerging materials or technologies that are shaping the future of robotic actuators?
Emerging materials like shape-memory alloys and advanced composites are revolutionizing actuator design, offering improved efficiency, strength, and adaptability. Technological advancements such as nanotechnology and soft robotics are also paving the way for more versatile and sophisticated actuator systems.
References
[1] Coiffet P, Chirouze M. An Introduction to Robot Technology. 1st ed. Dordrecht: Springer; 1983. 198 p. Available from: https://doi.org/10.1007/978-94-011-6100-8
[2] El-Atab, N., Mishra, R.B., Al-Modaf, F., Joharji, L., Alsharif, A.A., Alamoudi, H., Diaz, M., Qaiser, N. and Hussain, M.M. (2020), Soft Actuators for Soft Robotic Applications: A Review. Adv. Intell. Syst., 2: 2000128. https://doi.org/10.1002/aisy.202000128
[3] El-Atab N, Mishra R, Al-modaf F, Joharji L, Alsharif A, Alamoudi H, Diaz M, Qaiser N, Hussain M. Soft Actuators for Soft Robotic Applications: A Review. Adv Intell Syst. 2020 Aug 23;2:2000128. doi: 10.1002/aisy.202000128. Available from: https://www.researchgate.net/publication/343829255_Soft_Actuators_for_Soft_Robotic_Applications_A_Review
[4] NVS S, Kamma T, Krishna M, Ch H, Kumar, Shalem B. Smart Actuators: A Review. International Conference on Industrial Engineering and Operations, Rome, Italy: 2022 Feb 12. Available from: https://www.researchgate.net/publication/358565034_Smart_Actuators_A_Review
[5] Zehao Yuan. Current status and prospects of actuator in robotics. ACE (2023) Vol. 11: 181-191. DOI: 10.54254/2755-2721/11/20230232. Available from: https://ace.ewapublishing.org/article.html?pk=d01c5fcc8dea4ab0bacb5c8529721d87
Table of Contents
Electric ActuatorsHydraulic ActuatorsPneumatic ActuatorsMaterial Selection for ActuatorsDesigning for Efficiency and PerformanceSmart ActuatorsSoft Robotic ActuatorsAssembly Line RobotsQuality Control and InspectionMaterial Handling and LogisticsCustomization and Flexible ManufacturingMaintenance and Energy Efficiency