ROS 1 vs. ROS 2
Why Developers Are Making the Switch
13 Nov, 2023. 3 minutes read
The Robot Operating System (ROS) has been a game-changer in the world of robotics, enabling developers to create and manage complex robot systems with ease. However, as technology evolves, so does the need for more advanced tools and capabilities. This has led to the development of ROS 2, the successor to ROS 1, and it's gaining traction rapidly among developers. Let's explore the key differences between ROS 1 and ROS 2 and why many developers are making the switch:
ROS 1: The Foundation
ROS 1, often referred to simply as ROS, was introduced in 2007 and quickly became the go-to framework for robot development. It provided a flexible and modular architecture for building robotic applications, and its extensive library of packages and tools made it an attractive choice for developers. ROS 1 was built on a message-passing middleware called ROS Master, which uses the DDS (Data Distribution Service) communication standard for inter-process communication.
ROS 2: The Evolution
ROS 2 was introduced as the successor to ROS 1 and addresses several limitations that developers encountered with the original system. Some of the key differences and improvements outlined by the ROS organization in ROS 2 include:
Real-time Support: ROS 2 offers enhanced real-time capabilities, making it suitable for safety-critical and time-sensitive applications, which were challenging to achieve with ROS 1.
Middleware Agnostic: Unlike ROS 1, which relies on the ROS Master, ROS 2 is middleware agnostic. This means it can support multiple middleware systems, such as DDS, Fast RTPS, and more. This flexibility allows for better compatibility with various hardware and network configurations.
Improved Security: ROS 2 incorporates improved security features, ensuring that robotic systems can operate securely in environments where data integrity and confidentiality are paramount.
Enhanced Cross-Platform Compatibility: ROS 2 has been designed with cross-platform compatibility in mind, making it easier to run on various operating systems, including Windows.
Simplified Dependency Management: ROS 2 streamlines package management, reducing dependencies and making it easier to manage the libraries and modules required for a project.
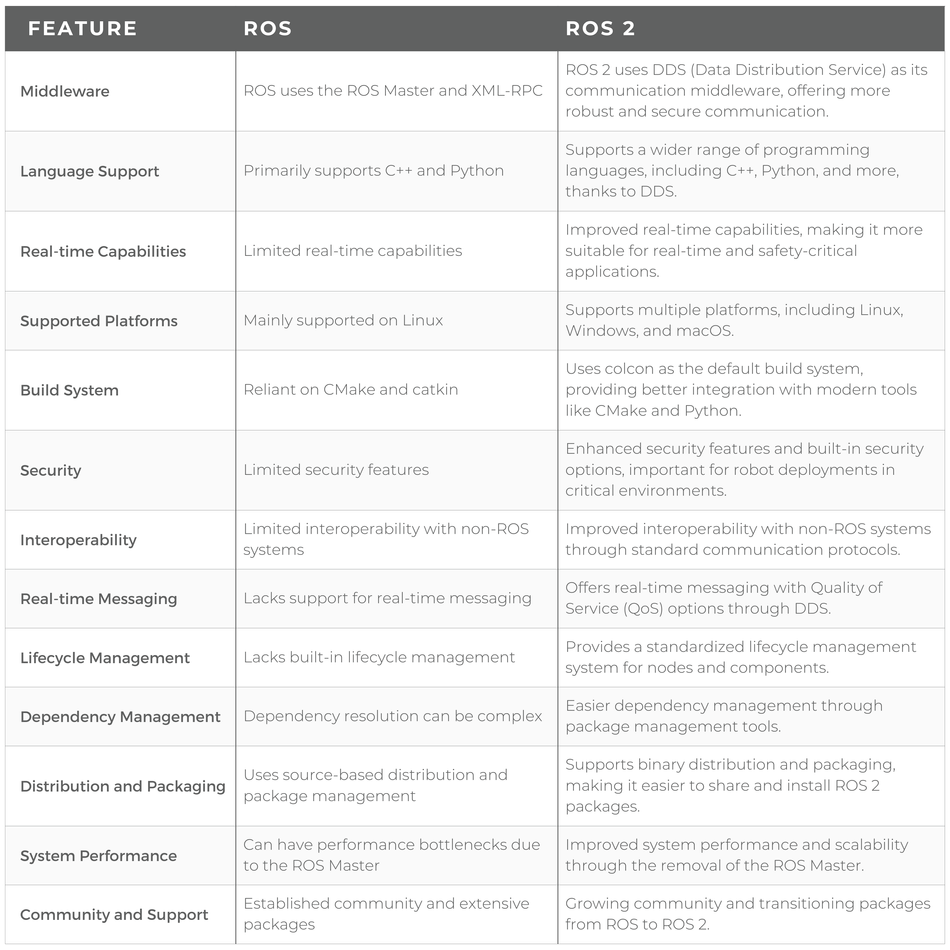
Here's a chart outlining some of the key technical differences between ROS and ROS2:
Why More Developers Are Making the Switch:
Improved Real-time Capabilities: ROS 2's support for real-time systems is a significant attraction for developers working on applications where timing and synchronization are crucial, such as autonomous vehicles and industrial automation.
Middleware Flexibility: ROS 2's middleware agnosticism allows developers to choose the best communication middleware for their specific use case, ensuring better integration with different hardware and network configurations.
Enhanced Security: With an increased focus on security, ROS 2 provides a safer platform for robots operating in critical environments, including healthcare, defense, and manufacturing.
Cross-Platform Compatibility: ROS 2's compatibility with various operating systems, including Windows, opens up new possibilities for developers and allows for a broader range of deployment options.
Long-Term Support: ROS 2 is well-supported and continually updated, providing developers with a future-proof platform for their projects. ROS 1 is no longer under active development, which means that it may not receive the same level of support and enhancements.
Overall, ROS 2 is designed to address some of the limitations and challenges of ROS 1, such as scalability, performance, security, and cross-platform compatibility. While both ROS 1 and ROS 2 have the same core functionality, many differences exist between the two, and the decision to use one over the other depends on specific use cases and requirements. To see a more in-depth analysis please visit “roboticsbackend”.
Here's what InDro's Engineering Manager, Arron Griffith, had to say: "Now is the time to make the switch to ROS 2 (or start using it). ROS 2 has matured over the 5 years to equal or better than ROS 1 after its first 5 years. Plus ROS 1 will be going End of Life over the next 2 years, so there is no point in starting with ROS 1 anymore, the future is ROS 2".
As the robotics industry continues to advance, ROS 2 is expected to play a pivotal role in shaping the future of robot development. If you're a developer, it's time to consider making the switch to ROS 2 to harness its full potential. Questions about ROS or ROS2? Connect with an expert HERE.