SCARA Robots: Revolutionizing Precision Automation in Industry
SCARA robots, known for their high speed and precision, are ideal for tasks requiring fast and accurate horizontal movements, such as assembly and packaging

08 Aug, 2024. 20 minutes read

No time now? Save for later.
We only use your email to send this link. Privacy Policy.
Introduction
SCARA (Selective Compliance Assembly Robot Arm) robots have revolutionized industrial automation with their unique design and capabilities. These versatile machines excel in high-speed, precise operations, particularly in assembly, packaging, and material handling tasks. SCARA robots feature a distinctive arm structure that allows for horizontal flexibility while maintaining high rigidity in the vertical direction, enabling them to perform complex movements with exceptional accuracy and repeatability.
Their compact footprint and ability to operate in confined spaces make them ideal for electronics manufacturing, pharmaceutical production, food processing industries, and various industrial applications. By significantly enhancing production speed, consistency, and quality, SCARA robots have become a critical resource in modern manufacturing environments. Their impact extends beyond efficiency gains, contributing to improved product quality, reduced labor costs, and increased workplace safety.
In this comprehensive exploration of SCARA robots, readers will gain insights into how these advanced robotic systems are shaping modern manufacturing. From their unique design and operational mechanics to their diverse applications across industries such as electronics, automotive, and pharmaceuticals, this article explains the technological nuances and benefits of SCARA robots. Expect detailed discussions on the robots' capabilities as well as a look at cutting-edge advancements and future potential. Whether you're a seasoned engineer or a newcomer to industrial automation, this article will provide a thorough understanding of the role of SCARA robots in driving industrial innovation.
What is a SCARA Robot?
SCARA, which is an acronym for Selective Compliance Assembly Robot Arm or Selective Compliance Articulated Robot Arm, is a type of industrial robot designed for precision and speed in various manufacturing applications. Developed in 1978 by a consortium led by Professor Hiroshi Makino of Yamanashi University, SCARA robots were initially created to improve assembly processes in industrial settings.[1]
Recommended reading: 7 Types of Industrial Robots: Advantages, Disadvantages, Applications, and More
The term "selective compliance" refers to the robot's unique mechanical properties. SCARA robots are designed with a parallel-axis joint layout, allowing for flexibility in the horizontal plane (X-Y axes) while maintaining rigidity in the vertical direction (Z-axis). This design enables the robot to perform complex movements with exceptional accuracy and repeatability, particularly in assembly tasks.
A typical SCARA robot consists of a base, two parallel links connected by revolute joints, a vertical Z-axis, and an end-effector. This configuration results in a cylindrical work envelope, allowing the robot to operate efficiently within its designated workspace. Most SCARA robots feature four axes of movement, though some models may have three or more.
Key characteristics of SCARA robots include:
High-speed operation, often faster than comparable Cartesian or articulated robots
Excellent precision and repeatability in the X-Y plane
Compact design with a small footprint
Vertical rigidity combined with horizontal flexibility
Typically lower payload capacity compared to other industrial robots
Simplified programming due to less complex inverse kinematics
SCARA robots offer distinct advantages in some specific applications compared to other industrial robots. While articulated robots provide greater flexibility with their six or more axes, and Cartesian robots excel in large, linear movements, SCARA robots bridge the gap by offering high-speed performance in a compact package. Their design makes them particularly well-suited for tasks requiring fast, precise movements in a confined space.
Recommended reading: What are Robot Gantries? Types, Applications, Advantages, Selection Criteria, and more
SCARA robots find their niche in various industries, excelling in applications such as electronics assembly, pick-and-place operations, packaging, and small-scale material handling. Their speed, accuracy, and ability to work in tight spaces make them invaluable in manufacturing processes that demand high throughput and consistent quality. As automation continues to evolve, SCARA robots remain a crucial component in the industrial robotics landscape, offering a balance of speed, precision, and efficiency for specialized tasks.
The Anatomy of SCARA Robots: Decoding the Robotic Marvel
Selective Compliance: The SCARA Advantage
Selective Compliance, a defining feature of SCARA robots, refers to the arm's ability to be compliant (flexible) in certain directions while remaining rigid in others. This unique characteristic is achieved through the robot's mechanical design, particularly its parallel-axis joint layout. In SCARA robots, compliance is allowed in the horizontal plane (X-Y axes), while rigidity is maintained in the vertical direction (Z-axis).
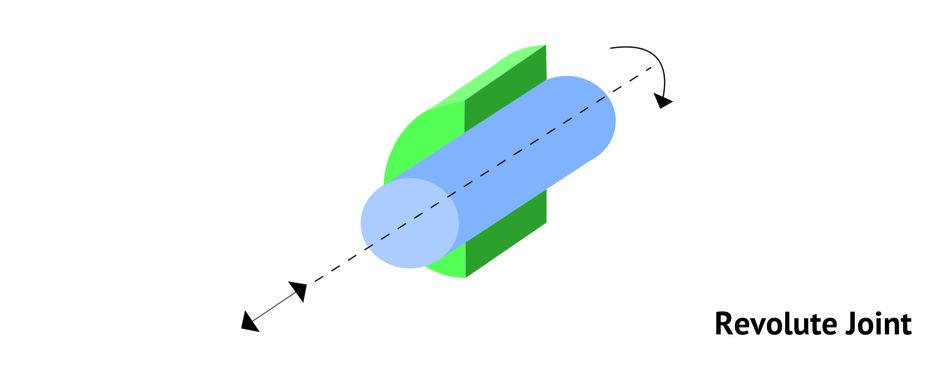
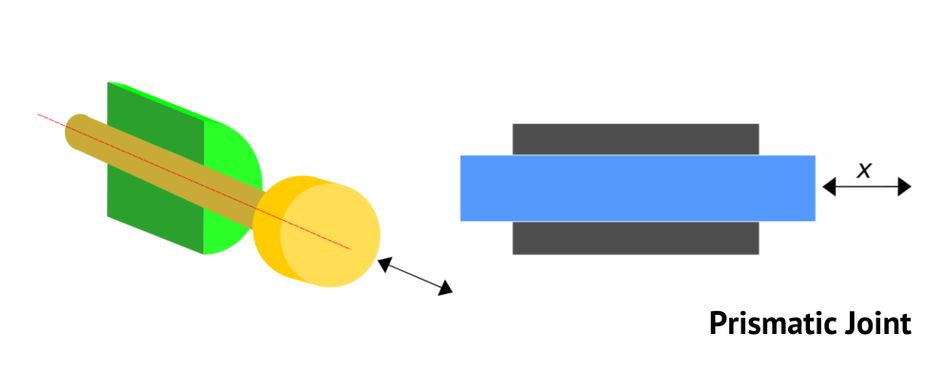
The mechanical principle behind selective compliance involves using two revolute joints connected by parallel links. These joints, typically called the "shoulder" and "elbow," allow for free movement in the horizontal plane. The vertical motion is controlled by a separate prismatic joint, which provides rigidity in the Z-axis.
This design offers several advantages:
Precision: The rigid Z-axis ensures high accuracy in vertical movements, which is crucial for assembly and pick-and-place operations.
Speed: The compliant horizontal plane allows for rapid movements, enhancing overall cycle times.
Simplicity: The design reduces the complexity of inverse kinematics calculations, leading to faster control and easier programming.
Force sensitivity: The compliance in the horizontal plane allows for gentle insertion tasks, reducing the risk of damage to delicate components.
Compared to other robot types, SCARA robots exhibit unique compliance characteristics:
Robot Type | X-Y Plane | Z-Axis | Rotational |
SCARA | Compliant | Rigid | Limited |
6-Axis | Compliant | Compliant | Flexible |
Cartesian | Rigid | Rigid | Limited |
Delta | Compliant | Compliant | Limited |
This selective compliance makes SCARA robots particularly suited for tasks requiring high-speed horizontal movements combined with precise vertical positioning, such as electronic component assembly, small parts handling, and dispensing applications. The mechanical simplicity resulting from this design also contributes to the robots' reliability and reduced maintenance requirements.
SCARA's Kinematic Configuration: Mastering Motion
SCARA robots typically feature a four-axis kinematic configuration designed to optimize speed and precision in planar operations. The standard joint arrangement consists of two revolute joints for horizontal movement, one prismatic joint for vertical movement, and a fourth revolute joint for end-effector rotation.
Recommended reading: Robot Joints: An In-Depth Guide to Anatomy, Physics and Challenges in Design
The first two revolute joints, often referred to as the "shoulder" and "elbow," are responsible for positioning the arm in the horizontal plane. These joints rotate around vertical axes, allowing for swift and accurate movements within the X-Y plane. The prismatic joint, usually integrated into the robot's vertical column, provides motion along the Z-axis. The final revolute joint, located at the end of the arm lengths, enables rotation of the end-of-arm effector around the Z-axis.
This configuration grants SCARA robots four degrees of freedom (DOF), allowing for:
X-axis translation
Y-axis translation
Z-axis translation
Rotation around the Z-axis
To better understand the workings of a SCARA robot, we'll explore its essential components and joint movements through a detailed example. This diagram illustrates the key joint movements of a SCARA robot, detailing their functions and contributions to the robot's operational capabilities.
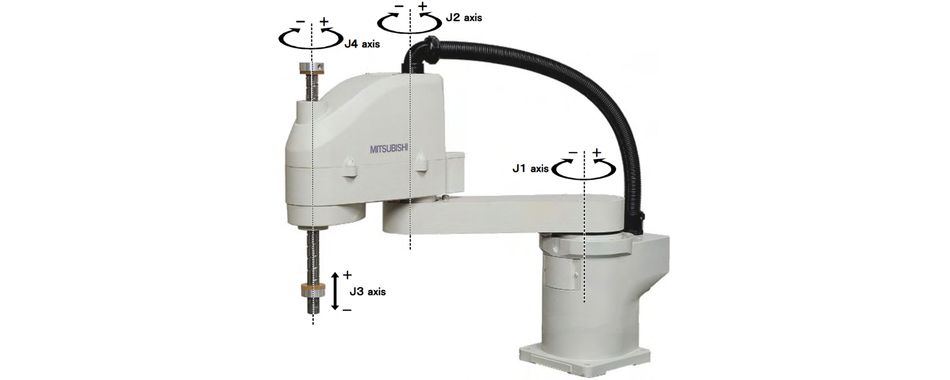
Below is a breakdown of each joint and its role in the robot's functionality:
J1 Axis:
Location: Base of the robot.
Motion: Rotational.
Function: Allows the robot arm to rotate around a vertical axis, enabling it to access a wide area around its base. This is typically used to position the arm in the correct orientation for tasks.
J2 Axis:
Location: Midsection of the arm.
Motion: Rotational.
Function: Provides additional rotational movement, working with the J1 axis to position the end-effector more precisely within its operational envelope. This joint helps extend or retract the robot arm horizontally.
J3 Axis:
Location: Along the vertical component extending downwards from the J2 joint.
Motion: Linear (up and down).
Function: Controls the vertical movement of the end-effector or tool attached to the robot, enabling it to be positioned at different heights. Useful for tasks like assembly where different levels of vertical positioning are required.
J4 Axis:
Location: End of the arm near the end-effector.
Motion: Rotational.
Function: This joint provides rotation of the end-effector itself, allowing it to orient tools or components in the correct direction, such as screwing, picking, and placing in various angles.
These joints enable the SCARA robot to perform complex picking, placing, and assembly tasks with high precision and flexibility within its operational range.
Inverse kinematics (IK) plays a crucial role in SCARA robot operation. This mathematical process calculates the required joint angles and displacements to position the end-effector at a desired point in space. Unlike forward kinematics, which calculates the end effector’s position from known joint parameters, IK works backward from a desired end effector position to find feasible joint configurations. For SCARA robots, IK is relatively straightforward due to their limited degrees of freedom and planar nature. The process involves determining the shoulder and elbow angles (J1 and J2) to achieve the desired X-Y position, calculating the vertical displacement (J3) for the Z position, and setting the wrist angle (J4) for the required end-effector orientation. This simplicity in IK contributes to the SCARA robot's speed and efficiency in control calculations, making it particularly suitable for high-speed pick-and-place operations and assembly tasks.
SCARA in Action: Unleashing Industrial Potential
Precision Pick-and-Place: The SCARA Specialty
SCARA robots have revolutionized pick-and-place operations across various industries, offering unparalleled speed, precision, and efficiency. Their unique design, featuring two parallel joints for horizontal movements and a vertical z-axis, makes them ideally suited for rapid, repetitive tasks in confined spaces.
A SCARA robot by FANUC performing rapid pick and place operations
In the electronics industry, SCARA robots excel at assembling small components on circuit boards with remarkable accuracy. The automotive sector leverages these robots for handling and placing parts in vehicle assembly lines. The food and beverage industry benefits from SCARA robots in packaging operations, where speed and hygiene are crucial.
The impact of SCARA robots on manufacturing efficiency is substantial. For instance, ABB's new IRB 930 SCARA robot delivers a 10% increase in throughput compared to other robots in its class by handling heavier workpieces simultaneously. This robot also offers a 200% stronger push-down capability, significantly improving productivity in force-intensive operations.[2]
Compared to manual processes, SCARA robots demonstrate impressive improvements in both speed and accuracy. While specific statistics vary depending on the application, it's common to see cycle times reduced by 50-70% and repeatability improved to within ±0.01mm. For example, Mecademic's SCARA robot can achieve speeds up to 3,000 mm/s, ensuring faster cycle times and maximum throughput.[3]
To illustrate the performance of SCARA robots in pick-and-place tasks compared to other robot types, consider the following table:
Robot Type | Speed | Precision | Payload Capacity | Workspace |
SCARA | High | High | Medium | Cylindrical |
6-Axis | Medium | High | High | Spherical |
Delta | Very High | Medium | Low | Hemispherical |
Cartesian | Medium | Very High | High | Rectangular |
SCARA robots strike an optimal balance between speed and precision, making them the preferred choice for many pick-and-place applications. Their cylindrical workspace is particularly advantageous for assembly lines and conveyor-fed operations. While they may have lower payload capacities than other robot types, their speed and accuracy in handling small to medium-sized objects make them irreplaceable in modern manufacturing environments.
Assembly Line Revolutionized: SCARA's Role
SCARA robots have significantly enhanced assembly line efficiency through their speed, precision, and adaptability. These robots excel in tasks requiring rapid, repetitive movements in a planar workspace, making them ideal for many assembly operations. Their selective compliance allows for the gentle handling of delicate components while maintaining rigidity for precise positioning.
SCARA robots outperform alternatives in several assembly tasks:
Circuit board assembly: SCARA robots can rapidly and accurately place small electronic components on PCBs.
Small parts insertion: Their precision makes them ideal for inserting screws, pins, or other small parts into assemblies.
Dispensing operations: SCARA robots can apply adhesives, sealants, or lubricants with high accuracy and consistency.
Packaging and palletizing: Their speed and reach make them efficient for end-of-line packaging tasks.
Key advantages of SCARA robots in assembly applications include:
High-speed operation, reducing cycle times
Excellent repeatability, ensuring consistent quality
Compact footprint, optimizing factory floor space
Flexibility to handle multiple tasks with quick changeovers
Cost-effective compared to six-axis robots for planar assembly tasks
Simplified programming and control due to fewer axes of motion
Case Study
Electronics Manufacturing A leading electronics manufacturer implemented SCARA robots in their smartphone assembly line. The company replaced manual assembly stations with SCARA robots for tasks such as placing camera modules, attaching flex cables, and applying adhesives. The results were significant:
Production speed increased
Defect rates decreased
Labor costs reduced
Floor space utilization improved
The SCARA robots' precision allowed for consistent placement of small components while their speed significantly reduced cycle times. The implementation also improved worker safety by automating repetitive tasks prone to repetitive strain injuries. This case demonstrates how SCARA robots can revolutionize assembly processes, improving efficiency and quality in manufacturing operations.
Recommended reading: Robots in the Manufacturing Industry: Types and Applications
Cutting-Edge SCARA: Innovations Pushing Boundaries
Smart SCARA: Integrating AI and Machine Learning
Artificial Intelligence (AI) and machine learning are revolutionizing SCARA robot capabilities, pushing the boundaries of their traditional roles in manufacturing and assembly. These advanced technologies enhance SCARA robots' adaptability, precision, and decision-making capabilities, making them more versatile and efficient in complex industrial environments.
AI integration is taking SCARA robots' sensory capabilities to the next level. Enhanced vision systems, powered by machine learning algorithms, allow SCARA robots to more accurately recognize and handle diverse objects. This advancement enables them to adapt to variations in part positioning and orientation, reducing the need for precise part presentation and increasing operational flexibility.
In complex operations, intelligent SCARA systems offer several key benefits, such as:
Adaptive decision-making: AI-enabled SCARAs can analyze real-time data and adjust their actions accordingly, optimizing performance in dynamic environments.
Predictive maintenance: Machine learning algorithms can predict potential failures, allowing for proactive maintenance and reducing downtime.
Process optimization: AI can analyze production data to suggest improvements in robot movements and cycle times, enhancing overall efficiency.
Improved quality control: Advanced vision systems coupled with AI can detect defects with higher accuracy, ensuring better product quality.
Concrete examples of AI-driven improvements in SCARA performance include:
Bin-picking applications: AI-powered 3D vision systems, like SOLOMON's intelligent sensor, enable SCARAs to efficiently pick randomly oriented parts from bins.[4] The system can determine the optimal grasp point and motion path in real time, significantly enhancing flexibility in part handling.
Force-sensitive operations: In assembly tasks such as screw driving, AI algorithms allow SCARAs to intelligently control torque and force. This ensures delicate components are not damaged during assembly, improving precision and reducing errors.
Collaborative environments: Machine learning enables SCARAs to work more effectively alongside human operators. AI algorithms can predict human movements and adjust the robot's actions accordingly, enhancing safety and efficiency in shared workspaces.
Adaptive assembly: In electronics manufacturing, AI-enhanced SCARAs can quickly adapt to different product variants on the same assembly line. This flexibility is crucial for industries with frequent product changes or customization requirements.
Quality inspection: Machine learning algorithms enable SCARAs to perform complex visual inspections, detecting subtle defects that might be missed by traditional machine vision systems. This capability is precious in industries with high-quality standards, such as electronics and medical device manufacturing.
The integration of AI and machine learning into SCARA robots is not just enhancing their current capabilities but also opening up new application areas. As these technologies continue to evolve, we can expect to see SCARAs taking on increasingly complex tasks, further cementing their role as versatile and indispensable tools in modern manufacturing and beyond.
Collaborative SCARA: The Next Frontier
Collaborative SCARA robots represent a significant evolution in robotics, blending the speed and precision of traditional SCARA robots with the safety features of collaborative robots (cobots). This development allows SCARAs to work alongside humans without needing safety fencing, expanding their potential applications and improving workplace flexibility.
Recommended reading: Cobots vs Robots: Understanding the Key Differences and Applications
The safety features enabling human-robot collaboration in SCARA cobots include:
Force and torque sensing: Sensors detect unexpected forces, allowing the robot to stop or slow down when contact is made.
Speed and separation monitoring: Advanced vision systems track human movements, adjusting the robot's speed or stopping it when a person enters its workspace.
Power and force limiting: The robot's power and force output are restricted to levels that won't cause injury upon contact.
Soft, rounded exteriors: Collaborative SCARAs often feature padded surfaces and rounded edges to minimize injury risk in case of collision.
These safety measures comply with ISO/TS 15066, the technical specification for collaborative robots, ensuring safe human-robot interaction.[5]
Recommended reading: Powering Soft Robotics: A Deeper Look at Soft Robotics Actuators
Key differences between traditional and collaborative SCARAs are:
Safety: Collaborative SCARAs can operate without safety barriers, while traditional SCARAs require fencing
Flexibility: Cobots can be easily redeployed for different tasks, offering greater adaptability
Programming: Collaborative SCARAs often feature intuitive programming interfaces for easier setup
Payload: Traditional SCARAs typically handle higher payloads than their collaborative counterparts
Speed: Collaborative SCARAs may operate at lower speeds when humans are nearby to ensure safety
Cost: Collaborative models often have a higher initial cost due to additional safety features
Technical specifications related to collaborative SCARA operation include:
Payload capacity: Typically ranging from 3-10 kg for collaborative SCARAs
Reach: Usually between 500-700 mm, similar to traditional SCARAs
Repeatability: Often within ±0.01 to ±0.02 mm, maintaining high precision
Maximum speed: Variable, with full speed in isolation and reduced speed (around 250 mm/s) when collaborating with humans
Force sensing sensitivity: As low as 1N in some models, allowing for delicate force control
Safety-rated monitored stop: Category 2, Performance Level d as per ISO 13849-1
Power and force limiting: Designed to stay within the pain threshold limits specified in ISO/TS 15066
Collaborative SCARA robots are expanding the potential applications of SCARA technology, allowing for more flexible manufacturing processes and closer human-robot interaction. As this technology continues to evolve, we expect to see further improvements in safety features, ease of use, and integration capabilities, making collaborative SCARAs an increasingly valuable tool in modern manufacturing environments.
Expanding SCARA Applications
SCARA robots are evolving beyond their traditional roles in electronics assembly and pick-and-place operations. Emerging applications are pushing the boundaries of SCARA capabilities, driven by advancements in robotics technology and industry demands for more flexible automation solutions.
Adaptations enabling SCARA robots to tackle new challenges include:
Enhanced vision systems for improved object recognition and handling
Integration of artificial intelligence for adaptive decision-making
Development of specialized end-effectors for diverse tasks
Implementation of force-sensing technology for delicate operations
Improved control systems for increased precision in micro-automation
These adaptations have opened up a range of innovative SCARA applications, such as:
Micro-automation in pharmaceuticals: SCARA robots are being used for handling delicate small parts in drug manufacturing and research. These robots are modified with high-precision actuators and specialized grippers to manipulate components smaller than 1mm.
Food and beverage industry: SCARA robots are now deployed in food processing and packaging. Modifications include food-grade materials for robot construction and specialized sanitization features to meet hygiene standards.
3D printing assistance: SCARAs are being adapted to support additive manufacturing processes. They are equipped with material dispensing tools and precise motion control for tasks such as multi-material printing or post-processing of 3D printed parts.
Laboratory automation: SCARA robots are entering research labs, modified with sterile handling capabilities and integrated with laboratory information management systems (LIMS) for tasks like sample preparation and analysis.
Retail automation: SCARAs are being used in automated retail environments, such as vending machines or micro-fulfillment centers. They are adapted with compact designs and enhanced object recognition capabilities to handle diverse product shapes and sizes.
Semiconductor manufacturing: In the highly controlled cleanroom environments required for chip production, advanced SCARA models are tackling complex tasks. Modifications include ultra-high precision actuators and specialized end-effectors for wafer handling and testing.
Collaborative assembly: Some SCARA robots are redesigned with built-in force sensors and safety features to work alongside human operators in shared workspaces, expanding their role in flexible manufacturing environments.
These emerging applications demonstrate the versatility of SCARA robots when adapted with new technologies. For instance, in micro-automation, SCARAs are modified with high-resolution encoders and advanced control algorithms to achieve sub-micron positioning accuracy. In food processing, they are equipped with washdown-rated components and smooth, crevice-free designs to prevent contamination.
The expansion of SCARA applications is driven by the robots' inherent advantages of speed and precision, combined with ongoing innovations in sensor technology, materials science, and control systems. As industries continue to demand more flexible and efficient automation solutions, SCARA robots are likely to find even more diverse roles in the future of manufacturing and beyond.
Implementing SCARA: Navigating Challenges and Optimizing Performance
Overcoming Space Constraints: SCARA's Compact Solution
SCARA robots excel in addressing workspace limitations due to their unique design. The cylindrical work envelope and compact arm structure allow SCARAs to operate efficiently in confined spaces where other robot types might struggle. This makes them particularly valuable in industries with limited floor space or densely packed production lines.
To optimize SCARA placement in confined areas, consider the following tips:
Utilize vertical space: Mount SCARAs on elevated platforms or walls to maximize floor space usage.
Implement multi-robot cells: Arrange multiple SCARAs in close proximity to increase productivity without expanding the footprint.
Optimize end-effector design: Use compact, multi-functional end-effectors to reduce the need for tool changes and save space.
Consider inverted mounting: Some SCARA models can be ceiling-mounted, freeing up valuable floor space.
Plan for maintenance access: Ensure sufficient space for routine maintenance and repairs to avoid disruptions.
Comparing SCARA footprints to other robot types:
Robot Type | Typical Footprint | Work Envelope | Space Efficiency |
SCARA | 250-400 mm diameter | Cylindrical | High |
6-Axis | 500-1000 mm diameter | Spherical | Medium |
Delta | 800-1500 mm diameter | Hemispherical | Low |
Cartesian | Variable (based on axes) | Rectangular | Medium |
Reach and workspace analysis are crucial in SCARA deployment for several reasons:
Optimal placement: Accurate reach analysis ensures the robot can access all required points within its work envelope without interference.
Cycle time optimization: Understanding the workspace allows for efficient path planning, reducing cycle times and improving productivity.
Collision avoidance: Proper analysis helps prevent collisions with surrounding equipment or structures, enhancing safety and reducing downtime.
Flexibility assessment: Workspace analysis aids in determining the robot's ability to handle future production changes or new tasks.
Multi-robot coordination: In cells with multiple robots, reach analysis is essential for defining safe operating zones and preventing interference between units.
By conducting thorough reach and workspace analysis, engineers can ensure high-performance for SCARA robots, maximize space utilization, and future-proof the robotic cell for potential changes in production requirements. This analysis typically involves 3D simulation software that can model the robot's movements and identify potential issues before physical implementation.
Programming Precision: Mastering SCARA Control
SCARA robot programming requires a deep understanding of robotic kinematics, motion control, and industrial automation principles. The programming requirements for SCARA robots typically include:
Kinematics modeling: Accurate representation of the robot's geometry and joint relationships
Motion planning: Defining smooth, efficient paths for the robot to follow
I/O handling: Managing inputs and outputs for sensors and end-effectors
Safety integration: Implementing safety protocols and emergency stop procedures
Vision system integration: Incorporating machine vision for object recognition and positioning
Error handling and recovery: Developing robust error detection and recovery mechanisms
Common programming languages and interfaces used for SCARA robots include:
Proprietary languages: Many SCARA manufacturers provide their own programming languages (e.g., Epson's SPEL+, Yamaha's SCARA Basic)
Industrial robot languages: Generic languages like ABB's RAPID or KUKA's KRL
High-level languages: Python, C++, and Java with robotics libraries
Graphical interfaces: Drag-and-drop programming environments for easier programming
Teach pendants: Physical devices for manual programming and control
To optimize SCARA motion paths and cycles, consider these tips:
Minimize joint movement: Design paths that require the least amount of joint rotation
Use smooth acceleration and deceleration profiles to reduce wear and improve accuracy
Implement parallel processing for I/O operations to reduce cycle times
Utilize circular interpolation for curved paths instead of multiple linear movements
Optimize the order of operations to minimize travel distance and time
Use look-ahead functions to anticipate and smooth out sharp corners in the path
Here's a pseudocode example for a basic SCARA pick-and-place operation:
# Initialize robot and set speed
SPEED 50
ACCEL 100, 100
# Define pick and place positions
POINT pick = {X 100, Y 200, Z -50, R 0}
POINT place = {X 300, Y 100, Z -50, R 90}
# Main program loop
WHILE TRUE
# Move to pick position
MOVE pick
# Activate vacuum gripper
ON gripper
# Wait for grip confirmation
WAIT gripSensor = ON
# Move to safe height
MOVE Z 0
# Move to place position
MOVE place
# Release part
OFF gripper
# Wait for release confirmation
WAIT gripSensor = OFF
# Move to safe height
MOVE Z 0
WENDThis pseudocode demonstrates a simple pick-and-place cycle, including movement commands, I/O control, and basic error checking. In practice, SCARA programming often involves more complex operations, error handling, and integration with other systems in the production line.
Maintenance Matters: Ensuring SCARA Longevity
Proper maintenance is crucial for ensuring the longevity and optimal performance of SCARA robots. Regular upkeep prevents unexpected downtime, extends the robot's lifespan, and maintains its precision.
Key maintenance procedures for SCARA robots include:
Lubrication of moving parts
Inspection and replacement of timing belts
Checking and tightening of bolts and fasteners
Cleaning and inspection of end-effectors
Calibration of axes and vision systems
Inspection of electrical connections and wiring
Common wear points in SCARA robots that require special attention are:
Joint bearings: Subject to continuous motion, these can wear out over time. Regular lubrication and inspection are essential.
Timing belts: These can stretch or develop cracks. Periodic tension checks and replacement prevent sudden failures.
Ball screws: Used in the Z-axis, these can accumulate wear. Regular cleaning and lubrication maintain their precision.
End-effectors: Grippers or tools attached to the robot arm can wear quickly due to frequent use. Regular inspection and maintenance are crucial.
Cable management systems: Cables can fray or break due to repeated bending. Routine checks help prevent unexpected failures.
Step-by-step maintenance guidelines for SCARA robots:
Power down the robot and ensure all safety protocols are in place.
Conduct a visual inspection of the entire robot, looking for any obvious signs of wear or damage.
Check and tighten all external bolts and fasteners according to the manufacturer's torque specifications.
Inspect and clean all exposed cables and connectors.
Lubricate all joints and moving parts as specified in the robot's manual.
Check the tension of timing belts and adjust or replace if necessary.
Inspect and clean the ball screw on the Z-axis, applying fresh lubricant as needed.
Test the functionality of all axes, listening for unusual noises or vibrations.
Inspect and maintain the end-effector, replacing worn parts as necessary.
Perform a calibration check and adjust if required.
Run a series of test cycles to ensure proper operation before returning the robot to production.
Predictive maintenance techniques for SCARA systems include:
Vibration analysis: Sensors detect abnormal vibrations that may indicate wear or misalignment.
Motor current monitoring: Fluctuations in servo motor current can signal impending failures.
Thermal imaging: Regular thermal scans can identify hotspots indicating excessive friction or electrical issues.
Performance data analysis: Tracking metrics like repeatability and accuracy over time can reveal gradual degradation.
Oil analysis: For robots with oil-lubricated gearboxes, regular oil analysis can detect wear particles and contaminants.
Implementing these predictive maintenance techniques allows for early detection of potential issues, enabling maintenance to be scheduled proactively and minimizing unexpected downtime. Many modern SCARA robots come equipped with built-in sensors and software that facilitate these predictive maintenance strategies, providing real-time data on the robot's condition and performance.
Conclusion
SCARA robots have revolutionized manufacturing with their speed, precision, and versatility. Their key advantages include high-speed operation, excellent repeatability, and a compact footprint, making them ideal for assembly, pick-and-place operations, and material handling in space-constrained environments. SCARA robots excel in industries such as electronics, automotive, and pharmaceuticals, where their ability to perform rapid, repetitive tasks with high accuracy is invaluable.
In modern manufacturing, SCARA robots are crucial in enhancing productivity, improving product quality, and reducing labor costs, contributing to a low-cost operation overall. Their integration into smart factories and Industry 4.0 initiatives has further solidified their importance, enabling more flexible and efficient production processes.
The future of SCARA technology looks promising, with advancements in artificial intelligence, machine vision, and collaborative robotics expanding their capabilities. These developments are likely to open up new applications and improve their adaptability to changing production requirements.
As industries prioritize efficiency and precision, SCARA robots will undoubtedly remain at the forefront of industrial automation, shaping the future of manufacturing and driving innovation in production processes worldwide.
Frequently Asked Questions
- What does SCARA stand for, and how does it differ from other robot types?
SCARA stands for Selective Compliance Assembly Robot Arm. Unlike 6-axis robots, SCARA robots have a cylindrical work envelope and excel in vertical assembly tasks due to their rigid Z-axis and compliant X-Y plane movement. - What are the primary industries that use SCARA robots?
SCARA robots are widely used in electronics manufacturing, automotive assembly, medical device production, and food packaging industries. Their speed and precision make them ideal for tasks like PCB assembly and small parts handling. - How do SCARA robots compare to Delta robots in terms of speed and accuracy?
SCARA robots generally offer higher accuracy and larger payloads than Delta robots, but Delta robots can achieve higher speeds for light payloads. SCARA robots are more versatile in terms of the types of tasks they can perform. - Can SCARA robots work collaboratively with humans?
Yes, recent developments have led to collaborative SCARA robots equipped with safety features that allow them to work alongside humans without safety barriers, enhancing flexibility in manufacturing environments. - What is the typical/maximum payload capacity of a SCARA robot?
SCARA robots can typically handle 1 to 20 kg payload, with some specialized models capable of handling up to 50 kg. The exact capacity depends on the robot's size and design. - How are SCARA robots programmed?
SCARA robots can be programmed using proprietary languages provided by manufacturers, industrial robot languages like RAPID or KRL, or high-level languages such as Python or C++ with robotics libraries. Many also offer teach pendant interfaces for easier programming. - What is the significance of the "Selective Compliance" in SCARA robots?
Selective Compliance refers to the robot's ability to be compliant (flexible) in the horizontal plane while remaining rigid in the vertical direction. This design allows for high-speed horizontal movements and precise vertical positioning, making SCARAs ideal for assembly and pick-and-place tasks.
References
[1] Owen-Hill A. What Is a SCARA Robot? The Background and Benefits [Internet]. RoboDK Blog. 2023 Mar 3. Available from: https://robodk.com/blog/what-is-a-scara-robot/
[2] ABB launches IRB 930 SCARA robot to transform pick-and-place and assembly operations [Internet]. New.abb.com. Available from: https://new.abb.com/news/detail/109709/prsrl-abb-launches-irb-930-scara-robot-to-transform-pick-and-place-and-assembly-operations
[3] MCS500 SCARA Robot [Internet]. Mecademic. Available from: https://www.mecademic.com/mcs500-scara-robot-n/
[4] Bin Picking Semi-Transparent Items Using AI - AccuPick Case Study, Solomon Technology Corporation, Available from: https://www.solomon-3d.com/case-studies/accupick/bin-picking-semi-transparent-items-using-ai/
[5] ISO 45001:2018 Occupational health and safety management systems — Requirements with guidance for use [Internet]. International Organization for Standardization. Available from: https://www.iso.org/standard/62996.html
in this article
1. Introduction2. What is a SCARA Robot?3. The Anatomy of SCARA Robots: Decoding the Robotic Marvel4. SCARA in Action: Unleashing Industrial Potential5. Cutting-Edge SCARA: Innovations Pushing Boundaries6. Expanding SCARA Applications7. Implementing SCARA: Navigating Challenges and Optimizing Performance8. Conclusion9. Frequently Asked Questions10. ReferencesNo time now? Save for later.
We only use your email to send this link. Privacy Policy.