What are manipulator robots? Understanding their Design, Types, and Applications
Ever wondered how robotic arms achieve precise movement in manufacturing, healthcare, or logistics? It’s all about smart design — from sturdy components and kinematics to advanced control systems. Discover how these elements work together to deliver accuracy, flexibility, and real-world efficiency.

Last updated on 17 Mar, 2025. 22 minutes read

Introduction
A robotic manipulator is a mechanical system designed to mimic the movement of a human arm.
It achieves this through joints, links, actuators, and end-effectors, that helps it to perform controlled motions across multiple axes.
These systems are game-changers in automation because they can precisely handle material processing, assembly, and even robotic surgery. They also excel at repetitive, hazardous tasks that demand accuracy beyond human capability.
What makes robotic manipulators truly great is their versatility. With customizable degrees of freedom (DoF), and precision-driven control systems, they can tackle everything from delicate medical procedures to heavy-duty industrial robot tasks.
To achieve precision, algorithms and control systems calculate joint angles and movement paths in real-time. On the other hand, techniques like inverse kinematics ensure accurate positioning and smooth motion.
In this article, we’ll dive deeper into their design, mechanics, and real-world applications — and understand the operation of robotic manipulators.
Further reading: What is Robotics? A Comprehensive Guide to its Engineering Principles and Applications
Components of Manipulator Robots
To better understand the functionality of manipulator robots, it is essential to examine their main components. These include the base, links, joints, actuators, sensors, and end-effectors. Each component plays a crucial role in the robot's overall performance and capabilities.
Base
The base is the foundation of the robotic manipulator arm. It keeps the entire system stable, ensuring the robot doesn’t tip, vibrate, or shift during operation.
In stationary systems, like those used in manufacturing, the base is fixed to the floor or a solid platform for maximum stability. For robots that need to move between stations — such as warehouse automation robots — the base may be mounted on wheels or tracks for mobility.

The design of the base is crucial. It must handle the robot’s weight, account for its range of motion, and support the forces generated during movement — especially in industrial robots that lift heavy payloads.
For example, a robot designed to lift automotive parts requires a sturdy base that can absorb vibration and support the manipulator’s weight. On the other hand, a lightweight collaborative robot that assists humans may use a smaller, more flexible base to maneuver freely.
Links
Links are the rigid segments that form the robot’s structure, connecting the joints and determining the robot’s overall shape. Each link plays a key role in defining the robot’s workspace, range of motion, and strength.

The design of these links is critical. Longer links allow the robot to extend further, increasing its workspace. However, longer links may introduce unwanted flexibility, reducing precision. Conversely, shorter links improve stability and control but limit the robot’s reach.
Material choice also matters. Lightweight materials like aluminum or carbon fiber improve speed and efficiency, while stronger materials like steel are ideal for heavy-duty robots that handle large payloads.
For example, a robotic arm used in material handling may have lightweight links to improve speed, while a welding robot in an industrial robot setup may use heavier links for better stability and strength.
Joints
Joints are the moving parts that connect the robot’s links and allow it to bend, rotate, or extend. The type and number of joints define the robot’s degrees of freedom (DoF) — a key factor in determining its flexibility and range of motion.
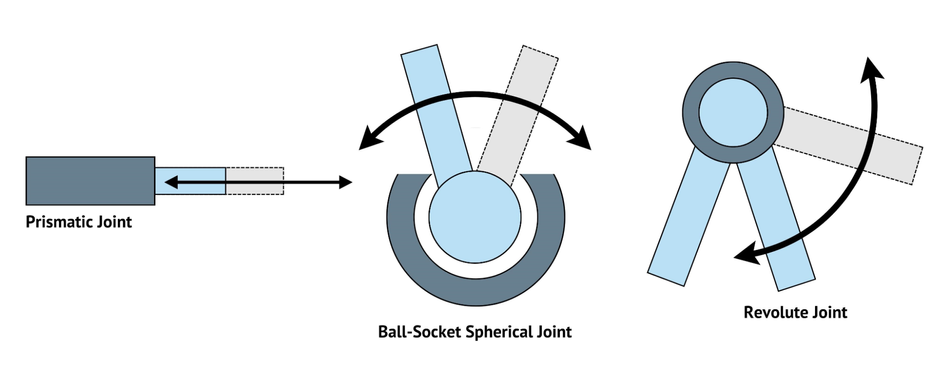
There are three main types of joints in robotic manipulators:
- Revolute Joints: These allow rotation around a single axis, similar to a human elbow. They are common in articulated robots and are ideal for tasks that require precise movement, such as welding or assembly.
- Prismatic Joints: These enable linear motion along a single axis — think of a drawer sliding open. They are often found in cartesian robots or pick-and-place systems that require straight-line motion.
- Ball-and-Socket Joints: These provide rotational movement across multiple axes, similar to a human shoulder. While less common, they offer excellent dexterity in robots that need flexible, multi-directional movement.
The number of joints directly impacts the robot’s DoF. For example, a robot with six joints (six DoF) can move with impressive flexibility, mimicking the movement of a human arm. Meanwhile, a robot with only three joints will have a simpler, more restricted range of motion but may excel in repetitive, high-speed tasks.
Choosing the right combination of joints is critical for meeting performance goals — whether for assembling electronics, handling delicate materials, or operating in robotic surgery.
Ball-and-socket joints provide rotational movement around multiple axes, allowing for a high degree of flexibility and dexterity. These joints are less common in manipulator robots but can be found in some specialized applications, such as robotic hands or humanoid robots, where a wide range of motion is necessary.
Further reading: Robotic Joint: How Robotic Solution is Boosting Efficiency
When designing joints for a manipulator robot, factors such as range of motion, load capacity, and wear resistance must be considered. The choice of joint type and design will directly impact the robot's performance, flexibility, and overall capabilities, making it a critical aspect of the robot's design process.
Actuators
Actuators are the muscle of a robotic manipulator — they create motion by driving the robot’s joints. Different types of actuators are chosen based on the robot’s speed, precision, and payload requirements.
Common actuator types include:
- Electric Actuators: Known for precision, they are ideal for tasks requiring accurate positioning, such as gripper control or fine assembly work.
- Hydraulic Actuators: Powerful and strong, these actuators excel in heavy-duty industrial robots that lift large payloads.
- Pneumatic Actuators: Fast and lightweight, these are popular in simple, repetitive automation tasks like packing or sorting.
For example, a robotic welder in an industrial robot setting may use powerful hydraulic actuators, while a robot assembling delicate electronics may rely on precise electric actuators for careful positioning.
Choosing the right actuator ensures the robot achieves the desired speed, power, and precision for its intended task.
Most modern robotic arms use electric servo motors at each joint as actuators. These motors (often DC brushless or AC synchronous motors) are chosen for their high torque-to-weight ratio and precision. Each motor is paired with a gearbox (harmonic drives and RV reducers are common in industrial robots) to amplify torque and hold position under load. The output of the gearbox drives the joint. Each joint’s angular position is measured by an encoder (optical or magnetic) or a resolver, providing feedback on the joint angle or rotation speed.
End-Effector
The end-effector is the component of a manipulator robot that interacts directly with the environment or objects within its workspace. It is responsible for performing the robot's primary tasks, such as gripping, cutting, or welding. The design of the end-effector is crucial, as it must be compatible with the robot's structure and capable of handling the required payload, precision, and task-specific requirements.
There are several types of end-effectors commonly used in manipulator robots, including grippers, suction cups, and welding torches. Each type of end-effector offers different capabilities and trade-offs, making them suitable for specific applications.
Grippers are used for grasping and holding objects, and they come in various designs, such as parallel, angular, and adaptive grippers. Grippers can be designed with different gripping forces, materials, and sizes to accommodate a wide range of objects and applications. For example, a parallel gripper may be used in a pick-and-place application, while an adaptive gripper could be employed for handling objects with irregular shapes.
Suction cups are used for lifting and handling objects with smooth surfaces, such as glass or metal sheets. They rely on vacuum pressure to create a secure bond between the end-effector and the object, allowing for precise and gentle handling. Suction cups can be designed with various sizes, shapes, and materials to accommodate different object types and surface conditions.
Welding torches are specialized end-effectors used for performing welding tasks, such as arc or spot welding. They are designed to deliver the required heat and electrical current to the welding site, ensuring a strong and durable bond between the materials being joined. Welding torches must be compatible with the robot's control system and capable of handling the high temperatures and electrical currents involved in the welding process.
Further reading: What are End Effectors in Robotics? Types of End Effectors, Applications, Future
Sensors and Feedback Systems
Sensors and feedback systems are integral components of manipulator robots, enhancing their ability to interact effectively with their environment. These systems provide real-time data, allowing the robots to adjust their actions dynamically. Vision systems, for instance, enable robots to identify, sort, and handle objects, while force-torque sensors help in applying the correct amount of force during operations, preventing damage to both the robot and the objects it handles. Proximity and distance sensors allow the robot to navigate its environment, avoiding obstacles and ensuring safe operation. These feedback mechanisms are crucial for tasks requiring high precision and reliability, as they allow for continuous monitoring and adjustment of the robot's movements and actions.
Control Systems for Manipulator Robots
Robot control systems play a vital role in the operation of manipulator robots, as they govern the robot's movements and ensure that it performs its tasks accurately and efficiently. There are two main types of control systems used in manipulator robots: open-loop and closed-loop control systems. Each type offers different advantages and disadvantages, making them suitable for specific applications and performance requirements.
Open-Loop Control Systems
Open-loop control systems are characterized by their lack of feedback, meaning that the robot's movements are determined solely by the input commands provided by the controller. In an open-loop system, the controller sends a series of commands to the robot's actuators, which then execute the movements without any feedback on the actual position or performance of the robot.
The main advantage of open-loop control systems is their simplicity, as they do not require complex feedback mechanisms or sensors to operate. This can result in lower costs and reduced system complexity, making open-loop systems suitable for applications where high precision and accuracy are not critical.
However, open-loop control systems have some significant disadvantages. Without feedback, the system cannot compensate for errors or disturbances that may occur during operation, such as mechanical wear, changes in load, or external forces. This can result in reduced accuracy and repeatability, as the robot's actual position may deviate from the desired position specified by the input commands.
Open-loop control systems are typically used in applications where the required level of precision and accuracy is relatively low, and the risk of errors or disturbances is minimal. Examples of such applications include simple pick-and-place tasks, conveyor systems, or basic material handling operations.
Closed-Loop Control Systems
Closed-loop control systems, in contrast to open-loop systems, incorporate feedback mechanisms and more complex algorithms to monitor and adjust the robot's movements in real-time. In a closed-loop system, the controller sends commands to the robot's actuators, while sensors continuously measure the robot's actual position and performance. This feedback is then used by the controller to adjust the commands, ensuring that the robot's movements closely match the desired position and trajectory.
The main advantage of closed-loop control systems is their ability to compensate for errors and disturbances that may occur during operation. By continuously monitoring the robot's position and performance, the system can make adjustments to the commands, resulting in improved accuracy and repeatability. This makes closed-loop systems suitable for applications where high precision and accuracy are critical.
However, closed-loop control systems have some disadvantages. They typically require more complex hardware and software, as they rely on feedback mechanisms and sensors to operate. This can result in increased costs and system complexity, making closed-loop systems less suitable for applications where simplicity and cost-effectiveness are priorities.
Closed-loop control systems are commonly used in applications where high precision and accuracy are required, such as assembly, inspection, or machining tasks. For example, a closed-loop system might be employed in a robotic welding application, where the robot must maintain a precise position and trajectory to ensure a strong and consistent weld. In this case, the closed-loop system would continuously monitor the robot's position and make adjustments as needed to maintain the desired welding path.
Key Control Techniques for Robotic Manipulators
Robotic control systems rely on established control techniques to ensure smooth, precise movement. The most common methods include:
- PID Control (Proportional-Integral-Derivative Control)
PID control is one of the most widely used methods in robotic manipulators. It works by calculating three key adjustments to keep the robot on its desired path:
- Proportional Control (P): Corrects errors based on the difference between the robot’s current position and its target position.
- Integral Control (I): Corrects past errors that build up over time.
- Derivative Control (D): Predicts future errors based on the robot's motion trends.
By combining these three adjustments, PID control minimizes overshooting, improves stability, and ensures precise positioning.
Example in Practice:
In arc welding, PID control stabilizes the welding torch’s movement, ensuring smooth, consistent weld seams — even if heat expansion causes minor movement shifts.
- Trajectory Planning
Trajectory planning focuses on designing the robot’s movement path — ensuring smooth transitions between points.
Instead of moving directly from one position to another (which may result in jerky motion), trajectory planning calculates optimized motion curves that prevent sudden speed changes or sharp angles.
This is particularly important for robots handling fragile materials or operating at high speeds.
Example in Practice:
In food packaging, a robotic arm equipped with trajectory planning can gently pick up items, move them along a controlled arc, and place them safely in boxes — minimizing impact and improving speed.
- Impedance Control (Force Control)
In tasks requiring physical interaction with objects, impedance control helps the robot adapt to unexpected forces.
Rather than following fixed movement paths, impedance control adjusts the robot’s movement based on resistance.
Example in Practice:
In robotic surgery, impedance control ensures the surgical tool applies just the right amount of pressure on tissue — reducing the risk of injury.
- Adaptive Control
Adaptive control systems modify the robot’s behavior based on changing conditions.
For instance, if a robot’s payload unexpectedly increases (like a heavier object on a conveyor), adaptive control recalculates motor power to maintain precise movement without slowing down.
Example in Practice:
In warehouse automation, adaptive control helps robotic arms quickly adjust when handling boxes of varying weights — ensuring consistent motion speed regardless of load.
Designing an Effective Control System
For engineers designing a robotic manipulator here’s what to consider for choosing the right control system:
- Precision Needs: Tasks like microchip assembly or laser cutting require closed-loop systems with PID control for maximum accuracy.
- Speed Requirements: For high-speed sorting or packaging, open-loop control may be faster and sufficient.
- Environmental Factors: In unpredictable environments (e.g., working with humans or fragile materials), adaptive control and force sensors become essential.
- Payload Variations: Robots handling objects of different weights should include adaptive control or impedance control for smooth motion.
Check out the below video for a complete crystal clear understanding (and don't miss out the next section on types of robotic arms):
Types of Manipulator Robots
Robotic manipulator arms typically have between three and six degrees of freedom, afforded by a series of joints (analogous to a shoulder, elbow, or wrist) which connect the various links of the device (analogous to an upper arm, forearm, or palm). The joints of a manipulator are usually either revolute joints or prismatic joints [1] . The type of arm determines its number of degrees of freedom, as well as its workspace (how far it can reach).
Revolute joint (rotary joint): rotation about one axis, i.e. twisting movement
Prismatic joint (linear joint): translation about one axis, i.e. extension movement
Cylindrical joint: rotation and translation about one axis
Spherical joint (ball and socket joint): three degrees of rotation
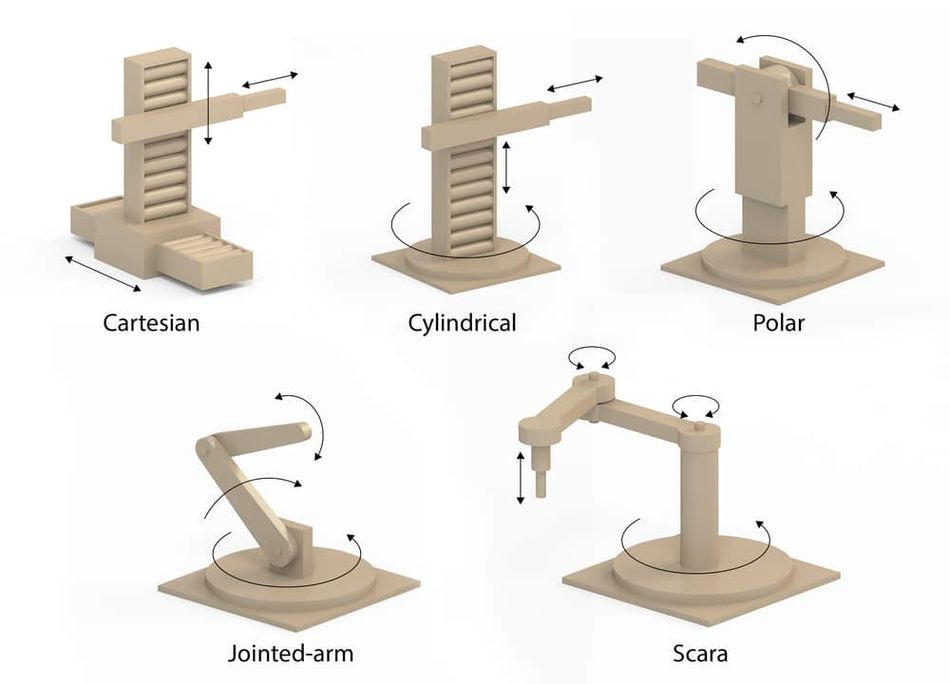
Manipulator robots can be classified based on their structure and movement capabilities. Each type has its advantages and disadvantages, making them suitable for specific applications. In this section, we will explore the different types of manipulator robots, including cartesian, cylindrical, spherical, and articulated robots.
Cartesian Manipulator Robots
Cartesian manipulator robots, also known as gantry robots, have a linear design and consist of three orthogonal axes (X, Y, and Z). These robots move in straight lines along each axis, allowing for precise positioning and movement within a defined workspace. The structure of Cartesian robots typically includes linear actuators or slides, which enable the robot to move along each axis independently.
One of the main advantages of Cartesian manipulator robots is their high accuracy and repeatability. Due to their linear design, these robots can achieve positioning accuracies of up to 0.001 mm. Additionally, Cartesian robots are known for their scalability, as they can be easily customized to accommodate various workspace sizes and payload capacities.
However, Cartesian manipulator robots have some limitations. Their movement is restricted to linear paths, which may not be suitable for applications requiring complex or curved trajectories. Furthermore, the size and weight of Cartesian robots can be substantial, especially for large-scale applications, which may result in increased energy consumption and reduced overall efficiency.
Cartesian manipulator robots are commonly used in industries such as manufacturing and automation. Their precise positioning capabilities make them ideal for tasks such as pick-and-place operations, assembly, and inspection. For example, Cartesian robots are often employed in the electronics industry for the assembly of printed circuit boards (PCBs), where high accuracy and repeatability are crucial for placing small components accurately.
Cylindrical Manipulator Robots
Cylindrical manipulator robots have a cylindrical workspace and consist of a combination of linear and rotational movements. These robots typically feature a vertical linear axis (Z-axis), a radial linear axis (R-axis), and a rotational axis (θ-axis) around the vertical axis. The structure of cylindrical robots often includes a vertical column mounted on a revolute joint at the base, with an arm that can extend radially and rotate around the column.
One of the main advantages of cylindrical manipulator robots is their ability to reach around obstacles within their cylindrical workspace. This makes them suitable for applications where access to the target object may be obstructed. Additionally, cylindrical robots can provide a compact footprint, as their vertical column and radial arm design allow them to occupy less floor space compared to other robot types.
However, cylindrical manipulator robots also have some limitations. Their work envelope is confined to a cylindrical shape, which may not be suitable for applications requiring a larger or differently shaped workspace. Moreover, the accuracy and repeatability of cylindrical robots may be lower than that of Cartesian robots, as the combination of linear and rotational movements can introduce additional sources of error.
Cylindrical manipulator robots are commonly used in industries such as assembly and packaging. Their ability to reach around obstacles makes them well-suited for tasks such as loading and unloading machines, where access to the target object may be limited. For instance, cylindrical robots can be employed in the pharmaceutical industry for the assembly of medical devices or the packaging of medication, where their compact footprint and ability to maneuver around obstacles are valuable assets.
Spherical Manipulator Robots
Spherical manipulator robots, also known as polar robots, have a spherical workspace and consist of a combination of linear and rotational movements. These robot arms, much like the human arm, exhibit a remarkable range of motion and flexibility, allowing them to efficiently navigate and perform tasks within a three-dimensional workspace. These robots typically feature a radial linear axis (ρ-axis), a polar rotational axis (θ-axis), and an azimuthal rotational axis (ϕ-axis). Spherical robots come with two revolute and a prismatic joint. The structure of spherical robots often includes a base-mounted arm that can extend radially and rotate around two perpendicular axes.
One of the main advantages of spherical manipulator robots is their ability to cover a large workspace with a relatively small footprint. Their unique combination of linear and rotational movements allows them to access a wide range of positions within their spherical workspace. Additionally, spherical robots can provide a high degree of dexterity, making them suitable for applications requiring complex and precise movements.
However, spherical manipulator robots also have some limitations. Their accuracy and repeatability may be lower than that of Cartesian robots, as the combination of linear and rotational movements can introduce additional sources of error. Moreover, the complexity of their movements can make programming and control more challenging compared to other robot types.
Spherical manipulator robots are commonly used in industries such as material handling and welding. Their ability to cover a large workspace and perform complex movements makes them well-suited for tasks such as transferring objects between different locations or performing intricate welding operations. For example, spherical robots can be employed in the automotive industry for tasks such as spot welding, where their dexterity and large workspace coverage are valuable assets.
Articulated Manipulator Robots
Articulated manipulator robots, also known as robotic arms, have a complex structure consisting of multiple joints and links that allow for a wide range of motion. These robots typically feature a series of revolute joints connected by rigid links, which enable them to perform movements in multiple degrees of freedom (DOF). The structure of articulated robots often includes a base-mounted arm with multiple segments, each connected by a joint that allows for rotational movement.
One of the main advantages of articulated manipulator robots is their high degree of flexibility and dexterity. Their multiple degrees of freedom enable them to perform complex tasks and reach a wide range of positions within their workspace. Additionally, articulated robots can be designed with various numbers of joints and links, allowing for customization to suit specific application requirements.
However, articulated manipulator robots also have some limitations. Their complex structure can make them more challenging to program and control compared to other robot types. Moreover, the accuracy and repeatability of articulated robots may be lower than that of Cartesian robots, as the multiple joints and links can introduce additional sources of error.
Articulated manipulator robots are commonly used in industries such as automotive and aerospace. Their flexibility and dexterity make them well-suited for tasks requiring complex movements and precise positioning, such as assembly, painting, and inspection. For example, articulated robots can be employed in the automotive industry for tasks such as assembling engines or installing windshields, where their ability to maneuver around obstacles and reach various positions within the workspace is crucial.
Axes in Robotic Manipulators
The number of axes in a robotic manipulator defines how freely the robot can move — but this flexibility isn’t just about adding more joints. It’s achieved through precise engineering concepts involving degrees of freedom (DoF), specialized joint types, and advanced kinematics.
- 1 to 3 axes: These robots rely mostly on prismatic joints, which enable linear movement along the X, Y, and Z axes. Each axis corresponds to controlled sliding motion, ideal for precise but straightforward tasks like CNC cutting or laser engraving. Since each axis moves independently, controlling motion paths is simpler — making these robots faster and easier to program.
- 4 to 6 axes: To add rotation, engineers introduce revolute joints, which allow the robot’s links to pivot. Each revolute joint adds a new degree of freedom, enabling movement like bending an elbow or twisting a wrist. For instance, a SCARA robot combines two rotating joints for horizontal flexibility and a linear Z-axis for controlled vertical movement. This design allows for fast, repeatable positioning.
- 6+ axes: Achieving full 3D motion requires combining multiple revolute joints with complex motion control. Here, advanced inverse kinematics comes into play. Instead of moving one joint at a time, inverse kinematics calculates the ideal combination of joint angles to position the end-effector precisely — much like calculating how your arm’s shoulder, elbow, and wrist should move to place your hand at a desired point.
This multi-axis control often requires PID control, trajectory planning, and real-time feedback to ensure smooth and stable movement — especially in tasks like robotic surgery, where millimeter precision is critical.
In essence, adding more axes enhances flexibility, but mastering their coordination is what drives precision. The real challenge lies in designing control systems that manage complex joint motion without compromising speed, stability, or accuracy.
How Robotic Arms Work?
A robotic manipulator achieves precision by combining sturdy components, smart movement planning, and precise control systems — all working together like gears in a machine.
The base, links, and joints form the robot’s physical structure, giving it strength, stability, and movement potential. For example, strong links help extend the robot’s reach, while precise joints enable smooth rotation or linear motion. Meanwhile, actuators power the robot’s movement, and the end-effector (like a gripper or welding torch) carries out the task.
But movement alone isn’t enough — the robot must know how to move. That’s where kinematics comes in. Using inverse kinematics, the system calculates the precise joint angles required to place the end-effector at its target point. This is crucial in tasks like assembling microchips or welding complex seams.
To keep everything accurate, the control system acts as the robot’s brain — continuously monitoring position, speed, and force. Sensors provide feedback, allowing the control system to correct errors in real-time. For instance:
- In robotic surgery, force sensors prevent excessive pressure on tissue.
- In material handling, adaptive control adjusts movement when lifting heavier objects.
- In electronics assembly, trajectory planning smoothens motion to avoid jerky starts and stops.
In short, the robot’s components enable movement, kinematics calculates the motion path, and the control systemensures the robot follows that path accurately — all working together to deliver stable, precise performance across industries.
Applications of Manipulator Robots
Industrial robots and more specifically, manipulator robots are widely used across various industries, offering numerous benefits such as increased productivity, precision, and safety. Certain types of robots may be more suitable for a particular application than others. For instance, SCARA robots are known for their speed and precision in palletizing and assembly tasks in various industrial applications. Choosing other types of manipulator robots would still get the work done, however, the right robot is necessary for maximum productivity and cost savings.
In this section, we will explore some of the key applications of manipulator robots, including manufacturing, assembly and packaging, material handling, and welding and cutting.
Manufacturing
Manipulator robots play a significant role in modern manufacturing processes, where their precision, speed, and repeatability make them ideal for tasks such as pick-and-place operations, assembly, and inspection. By automating these tasks, robots can help manufacturers increase productivity, reduce labor costs, and improve product quality.
For example, in the electronics industry, manipulator robots are commonly used for the assembly of printed circuit boards (PCBs). These robots can accurately place small components, such as resistors and capacitors, onto the PCBs at high speeds, ensuring consistent quality and reducing the risk of human error. Additionally, robots can be used for inspection tasks, such as checking for defects or verifying component placement, further improving product quality and reducing the need for manual inspection.
In the automotive industry, manipulator robots are employed for tasks such as welding, painting, and assembly. Robots can perform these tasks with high precision and speed, ensuring consistent quality and reducing the time required for production. Moreover, by automating these tasks, manufacturers can reduce the risk of workplace injuries and improve overall safety.
Overall, the use of manipulator robots in manufacturing processes has revolutionized the way products are made, offering numerous benefits in terms of productivity, quality, and safety.
Assembly and Packaging
Manipulator robots are widely used in assembly and packaging processes, where their precision, speed, and flexibility make them ideal for handling a variety of tasks. By automating these processes, robots can help companies reduce labor costs, improve efficiency, and maintain consistent product quality.
In assembly applications, manipulator robots can be used to pick up and place components, fasten screws, or apply adhesives, among other tasks. Their high precision and repeatability ensure that components are assembled accurately and consistently, reducing the risk of defects and improving overall product quality. For example, in the consumer electronics industry, robots can be used to assemble smartphones, tablets, or other devices, where precise component placement and alignment are critical for proper functionality.
Further reading: What are Robotic Assembly Lines? History, Components, Advantages, Limitations, Applications, and Future
In packaging applications, manipulator robots can be used for tasks such as loading and unloading products, sealing packages, or applying labels. Their speed and accuracy enable them to handle these tasks more efficiently than human workers, reducing the time required for packaging and improving overall productivity. For instance, in the food and beverage industry, robots can be used to package products such as bottles, cans, or boxes, ensuring that they are sealed and labeled correctly before being shipped to customers.
By automating assembly and packaging processes, manipulator robots can help companies increase efficiency, reduce labor costs, and maintain consistent product quality, making them an invaluable tool in these industries.
Material Handling
Manipulator robots are extensively used in material handling applications, where their speed, precision, and ability to work in hazardous or challenging environments make them an ideal solution. By automating material handling tasks, robots can help companies increase efficiency, reduce human workload, and improve overall safety.
In material handling applications, manipulator robots can be used for tasks such as transferring objects between different locations, sorting and organizing items, or loading and unloading materials. Their flexibility and adaptability enable them to handle a wide range of object sizes, shapes, and weights, making them suitable for various industries and applications.
For example, in the warehousing and logistics industry, robots can be used to pick up and place items on shelves, sort packages, or load and unload trucks. Their speed and accuracy can help companies reduce the time required for these tasks, improving overall efficiency and reducing labor costs. Additionally, by automating these tasks, companies can minimize the risk of workplace injuries caused by heavy lifting or repetitive motions.
Further reading: Material Handling Automation: A Comprehensive Guide for Engineers
In the manufacturing industry, manipulator robots can be used to transfer raw materials or finished products between different stages of the production process. Their ability to work in hazardous, or inaccessible places such as high temperatures or areas with limited access, makes them an invaluable tool for ensuring the smooth flow of materials throughout the production line.
By automating material handling tasks, manipulator robots can help companies increase efficiency, reduce human workload, and improve overall safety, making them an essential tool in a wide range of industries and applications.
Some of the manipulator robots also come with advanced Robot Operating Systems (ROS) that provide a flexible framework for developing and deploying applications. This makes the process of deploying robotic automation solutions a seamless process. Open Robotics, Boston Dynamics, ABB, Universal Robots, KUKA, Microsoft, and NVIDIA are some of the organizations involved in the development of ROS.
Healthcare
Manipulator robots are crucial in the healthcare sector, providing unmatched precision essential for surgeries and minimizing errors. Their steady, controlled movements are necessary for procedures requiring exactness, making them vital assets in operating environments. These robots also significantly contribute to patient rehabilitation, offering controlled, repetitive exercises necessary for effective recovery, especially for stroke or spinal cord injury patients.
In pharmaceutical environments, manipulator robots are invaluable, accelerating drug discovery and handling precise tasks efficiently, thereby reducing contamination risks. For instance, tasks like pipetting and vial capping are executed with increased efficiency and accuracy. With the advent of telemedicine, manipulator robots are facilitating remote robotic surgeries, accurately replicating surgeon movements, and providing specialized care in remote locations.
Understanding the applications and functionalities of manipulator robots in healthcare is imperative for professionals in the field. Their precision, efficiency, and adaptability make them indispensable tools in enhancing patient care and driving innovation in medical practices globally.
Conclusion
Manipulator robots have become an integral part of various industries, offering numerous benefits such as increased productivity, precision, and safety. Their diverse designs, including Cartesian, cylindrical, spherical, and articulated robots, enable them to perform a wide range of tasks in applications such as manufacturing, assembly, material handling, and welding. By understanding the components, control systems, and applications of manipulator robots, we can appreciate their importance and potential for continued growth in the years to come.
Frequently Asked Questions (FAQs)
1. What are the main types of manipulator robots?
The main types of manipulator robots are Cartesian, cylindrical, spherical, and articulated robots. Each type has its advantages and disadvantages, making them suitable for specific applications.
2. What are the key components of a manipulator robot?
The key components of a manipulator robot include the base, links, joints, and end-effector. Each component plays a crucial role in the robot's overall performance and capabilities.
3. What is the difference between open-loop and closed-loop control systems?
Open-loop control systems do not use feedback and rely solely on input commands to control the robot's movements. Closed-loop control systems, on the other hand, incorporate feedback mechanisms to monitor and adjust the robot's movements in real-time, resulting in improved accuracy and repeatability.
4. In which industries are manipulator robots commonly used?
Manipulator robots are commonly used in industries such as manufacturing, assembly and packaging, material handling, and welding and cutting. Their precision, speed, and flexibility make them ideal for a wide range of tasks in these industries.
5. What are some future trends in manipulator robots?
Future trends in manipulator robots include the development of more advanced control systems, the integration of artificial intelligence and machine learning technologies, and the use of new materials and designs to improve performance and efficiency. These trends have the potential to further expand the capabilities and applications of manipulator robots in various industries.
References
[1] Lewis FL, Dawson DM, Abdallah CT. Robot manipulator control: theory and practice. CRC Press; 2003 Dec 12.
[2] Gallardo-Alvarado J, Gallardo-Razo J. Robot manipulators. In: Gallardo-Alvarado J, Gallardo-Razo J, editors. Emerging Methodologies and Applications in Modelling, Identification and Control, Mechanisms. Academic Press; 2022. p. 421-488. Available from: https://doi.org/10.1016/B978-0-32-395348-1.00034-X
[3] Fadali MS, Visioli A. Introduction to digital control. In: Fadali MS, Visioli A, editors. Digital Control Engineering. 3rd ed. Academic Press; 2020. p. 1-8. Available from: https://doi.org/10.1016/B978-0-12-814433-6.00001-6
[4] Siciliano, B., Sciavicco, L., Villani, L., & Oriolo, G. (2008). Robotics: Modelling, Planning and Control.
Table of Contents
IntroductionComponents of Manipulator RobotsBaseLinksJointsActuatorsEnd-EffectorSensors and Feedback SystemsControl Systems for Manipulator RobotsOpen-Loop Control SystemsClosed-Loop Control SystemsKey Control Techniques for Robotic ManipulatorsTypes of Manipulator RobotsCartesian Manipulator RobotsCylindrical Manipulator RobotsSpherical Manipulator RobotsArticulated Manipulator RobotsAxes in Robotic ManipulatorsHow Robotic Arms Work?Applications of Manipulator RobotsManufacturingAssembly and PackagingMaterial HandlingHealthcareConclusionFrequently Asked Questions (FAQs)References