Difference between Active and Passive Filters?
This article explores the key differences between active and passive filters, detailing their transfer functions, frequency responses, components, circuit configurations, stability, design challenges, approximation methods, and CAD tools for filter simulation and optimization.

Last updated on 09 Apr, 2024. 22 minutes read

Active and Passive Components on a PCB
Introduction
Filters are fundamental building blocks in various electronic systems, performing the crucial task of selectively passing desired frequencies in a signal while attenuating unwanted ones. This selective processing allows for extracting specific information or protecting sensitive circuits from harmful noise. There exist two main categories of filters: active and passive!
Curious to know the difference between Active and Passive filters? Passive filters, built with resistors, capacitors, and inductors, leverage the inherent properties of these components to attenuate or pass specific frequencies. Conversely, active filters combine passive components with active elements like operational amplifiers, offering greater control and design flexibility.
While passive filters excel in simplicity and linearity, active filters provide superior performance, improved signal isolation, and the ability to realize more complex transfer functions. However, this enhanced functionality comes at the cost of increased circuit complexity and power consumption. Still confused about the difference between active and passive filters? Let’s explore these and make informed decisions when incorporating filters into our electronic designs.
What are Filters in Electronic Circuits?
Filters in electronic circuits are networks designed to manipulate the frequency components of an input signal selectively. By attenuating, passing, or amplifying specific frequencies, filters shape the amplitude and phase characteristics of the signal to achieve the desired frequency response.
The French mathematician, Joseph Fourier, discovered that any periodic signal can be represented as a sum of sine and cosine waves. [1] The amplitudes of these waves can be determined by analyzing the signal. This means that any periodic signal can be broken down into a set of sine and cosine waves with specific frequencies. These individual frequencies can be manipulated to change the characteristics of the entire signal. As a result, filters can be described by their effect on different frequency components of a signal.
The primary goal of filters is to remove unwanted frequency components, such as noise or interference while preserving or enhancing the desired signal components. They are crucial in signal processing applications, as they improve signal quality, prevent aliasing, and maintain the signal within the desired frequency range. Filters help maintain signal integrity and extract relevant information from complex signals in various electronic domains, including telecommunications, audio systems, and data acquisition.
Recommended Reading: How Do Circuit Boards Work: A Comprehensive Guide to the Heart of Electronics
Types of Filters
Filters can be broadly categorized into two main types: passive filters and active filters. However, within these, there are fundamental types based on frequency response. The most common types of filters are low-pass, high-pass, band-pass, and band-reject (or notch) filters. Let’s see the difference between active and passive filters.
Active Filters
Active filters combine passive components with active elements, primarily operational amplifiers (Op-amp) and transistors. The inclusion of active components enables more complex filter designs, providing several advantages over passive filters. Active filters offer higher selectivity, better signal isolation, and the ability to realize more precise transfer functions. [2] They can also introduce gain to compensate for signal attenuation caused by the passive components. Nevertheless, active filters require a power supply and may introduce noise and distortion due to the presence of active components.
Passive Filters
Passive filters rely solely on passive components – resistors (R), capacitors (C), and inductors (L) – to manipulate signal frequencies. These components offer inherent properties that affect how they interact with current at different frequencies. Passive filters are renowned for their simplicity, linearity, and ability to handle high power levels. However, passive filters face limitations in terms of gain, selectivity, and flexibility in shaping the frequency response.
Transfer Functions and Frequency Response
The mathematical representation of filters relies heavily on transfer functions and frequency response. The transfer function, H(s) in the s-domain or H(z) in the z-domain, describes the relationship between the input and output signals of a filter in terms of gain and phase characteristics as a function of frequency. The frequency response, obtained by evaluating the transfer function at different frequencies, provides insights into the filter's passband, stopband, and transition band behavior.
Filter Order and Roll-Off Rate
Filter order, defined as the highest degree of the denominator polynomial in the transfer function, plays a significant role in filter design. Higher-order filters offer steeper roll-off rates and better selectivity, allowing for sharper transitions between the passband and stopband. However, increasing the filter order also leads to increased complexity and potential stability issues.
The roll-off rate, measured in decibels per octave (dB/octave) or decibels per decade (dB/decade), quantifies how quickly the filter's response attenuates in the stopband. All first-order filters have a 20 dB/decade roll-off. The same roll-off can also be specified as 6 dB/octave. An octave is a term borrowed from music and represents a doubling of frequency. [3]
Cutoff Frequency and Passband/Stopband
The cutoff frequency is a critical parameter that separates the passband and stopband of a filter. In a low-pass filter, frequencies below the cutoff are passed, while those above are attenuated. Conversely, in a high-pass filter, frequencies above the cutoff are passed, and those below are attenuated. Band-pass and band-stop filters have two cutoff frequencies, defining the range of frequencies that are passed or attenuated, respectively.
Transfer Functions for Common Filter Types
Transfer functions for common filter types have specific forms that reflect their frequency-selective behavior.
For example:
First-order low-pass filter:

where ω₀ is the cutoff frequency.
Second-order band-pass filter or resonant RLC circuit:

where Q is the quality factor, and ω₀ is the center frequency.
Second-order notch filter:

where Q is the quality factor, and ω₀ is the notch frequency.
These transfer functions provide a mathematical foundation for analyzing and designing filters to achieve the desired frequency response characteristics. This enables engineers to select the appropriate filter type and parameters for their specific applications.
Components Used in Active Filters
Active filters incorporate active components alongside passive ones. They combine passive components with active elements, primarily operational amplifiers (Op-amp) and transistors. Here's a breakdown of the key players in active filters:
Operational Amplifiers (Op-amps) are high-gain differential amplifiers that amplify the difference between two input voltages. They provide features like high input impedance, low output impedance, and controllable gain.
Transistors can achieve a limited filtering function in basic active filter circuits, requiring fewer components than an op-amp-based design. Some transistor types may operate effectively at lower voltages than readily available op-amps, making them suitable for battery-powered or low-power circuits.
Recommended Reading: Understanding Transistors: What They Are and How They Work
Active Filter: Circuit Configurations and Transfer Functions
Active filters can be designed using various circuit configurations, each with its own transfer function and frequency response characteristics. The three most common circuit configurations are:
Sallen-Key Configuration
Second-order filter topology using two op-amps, two resistors, and two capacitors.
Known for simplicity, low component count, and good performance in low-Q applications.
Transfer function of a Sallen-Key low-pass filter:

Cutoff frequency:

Quality factor:

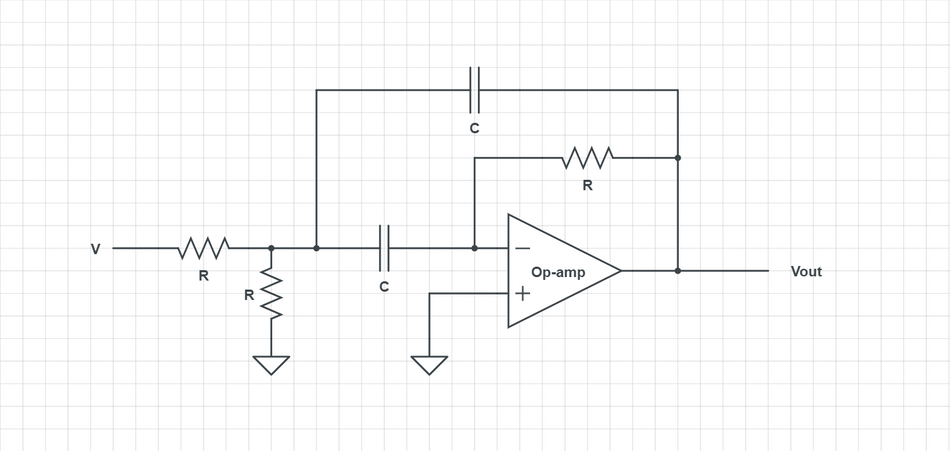
Multiple Feedback (MFB) Configuration
Second-order filter topology using one op-amp, three resistors, and two capacitors.
Offers good performance in high-Q applications and provides a non-inverting bandpass output.
Transfer function of an MFB bandpass filter:

Cutoff frequency:

Quality factor:

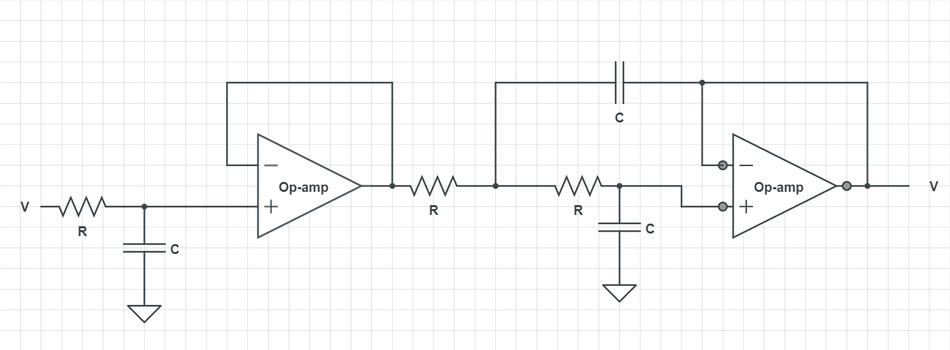
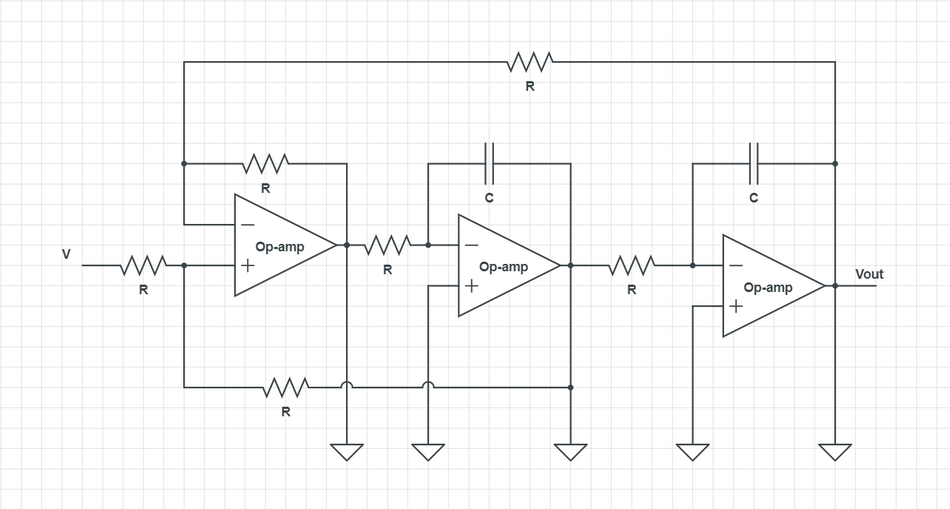
State Variable Configuration (Kerwin-Huelsman-Newcomb Filter)
Second-order filter topology using three op-amps, four resistors, and two capacitors.
Provides simultaneous low-pass, high-pass, and bandpass outputs.
Transfer functions:
Low-pass filter:

Bandpass filter:

High-pass filter:

Cutoff frequency:

Quality factor:

Here’s are the advantages and disadvantages of each configuration:
Sallen-Key: Simple and economical, but limited Q range and sensitivity to component variations.
Multiple Feedback: Good high-Q performance, but higher component count and may require impedance matching.
State Variable: Multiple outputs and good control over Q, but highest component count and complexity.
Active Filter: Stability and Component Selection
Stability is a critical consideration in the design of active filters, as unstable filters can lead to oscillations, distortion, and circuit damage. Active filter stability is closely related to component selection and circuit design, as the choice of op-amps, passive components, and circuit topology can significantly impact the filter's stability.
Op-Amp Selection
Choose op-amps with high gain-bandwidth product (GBP), low input noise, and good slew rate for active filter designs.
Avoid op-amps with excessively high GBP, particularly in high-Q filters, to prevent stability issues.
Select an op-amp with sufficient GBP to meet the filter's frequency response requirements while maintaining an adequate phase margin.
Passive Component Selection
Use high-quality, low-tolerance components with good temperature stability to minimize variations in the filter's response over time and temperature.
Select capacitors with low equivalent series resistance (ESR) and low dielectric absorption to reduce the likelihood of instability caused by parasitic effects.
Circuit Layout and Component Placement
Employ proper grounding techniques, such as using a single-point ground and minimizing ground loops, to reduce noise and prevent instability.
Place components close to the op-amp to minimize trace inductance and capacitance, which can introduce parasitic poles and zeros in the transfer function.
Feedback Loop Design
Design the feedback loop to provide sufficient phase margin and gain margin, ensuring stable operation across the desired frequency range.
Use techniques such as lead-lag compensation and pole-zero cancellation to improve the feedback loop's stability.
Best Practices for Stable Active Filter Design
Select op-amps with appropriate GBP, noise, and slew rate characteristics for the desired filter specifications.
Use high-quality, low-tolerance passive components with good temperature stability.
Minimize parasitic effects through careful circuit layout and component placement.
Implement proper grounding techniques to reduce noise and prevent instability.
Design feedback loops with adequate phase margin and gain margin, using frequency compensation techniques when necessary.
Avoid excessively high Q factors, making the filter more susceptible to instability.
Simulate the filter design using realistic component models and perform stability analysis to identify potential issues.
Prototype the filter and perform thorough testing to validate its stability under various operating conditions.
Active filters leverage the control and amplification capabilities of op-amps to achieve more versatile and precise filtering functionalities compared to their purely passive counterparts. By incorporating these practices, users can enhance the overall design process and ensure the creation of highly stable and reliable active filters.
Recommended Reading: Guide to PCB Mounting: Techniques, Tips, and Best Practices
Active Filter: Applications
Active filters offer enhanced performance, flexibility, and control compared to passive filters in various engineering fields. Some of the key application areas for active filters include signal conditioning, data acquisition, and control systems.
In signal conditioning, active filters play a crucial role in improving signal quality and reducing noise. For example, an anti-aliasing filter is often used before analog-to-digital conversion to prevent high-frequency components from being aliased into the sampled signal.
In data acquisition systems, active filters are used for both pre-sampling and post-sampling signal conditioning. Pre-sampling filters, such as low-pass or band-pass filters, are used to limit the signal bandwidth and prevent aliasing before analog-to-digital conversion. Post-sampling filters, such as smoothing filters or decimation filters, are used to remove noise and improve the signal resolution after digital-to-analog conversion.
In control systems, active filters are used for various purposes, such as feedback loop compensation and noise reduction. For example, a lead-lag compensator can be implemented using an active filter to improve the system's stability and transient response. [4] The lead-lag compensator introduces a phase lead at higher frequencies to increase the phase margin and a phase lag at lower frequencies to reduce the steady-state error.
Another example of active filters in control systems is notch filters for noise reduction. Notch filters are designed to attenuate a specific frequency or a narrow band of frequencies, such as power line interference or mechanical resonances. An active notch filter can be implemented using a twin-T network and an op-amp, providing high Q factors and sharp frequency selectivity.
These are just a few examples, highlighting the versatility of active filters in shaping signals across various engineering applications. Other notable areas include audio signal processing, biomedical instrumentation, and communication systems.
Components Used in Passive Filters
Passive filters are constructed using three main components: resistors, capacitors, and inductors. Each component plays a crucial role in shaping the frequency response of the filter.

Resistors are passive components that oppose the flow of electric current. The specific values of resistors, in conjunction with capacitors or inductors, determine the filter's cutoff frequency. They determine the shape of the frequency response curve. Resistors dissipate electrical energy as heat during their operation. This energy loss can contribute to a reduction in the overall signal strength, especially in high-power applications.
Capacitors are passive components that store energy in an electric field. In passive filters, capacitors block low-frequency signals and pass high-frequency signals. They are used with other components to create high-pass and band-pass filters. Capacitors exhibit decreasing reactance with increasing frequency, allowing high-frequency signals to pass through while attenuating low-frequency signals.
Inductors are passive components that store energy in a magnetic field. In passive filters, inductors block high-frequency signals and pass low-frequency signals. They are used with other components to create low-pass and band-stop filters. Inductors exhibit increasing reactance with increasing frequency, allowing low-frequency signals to pass through while attenuating high-frequency signals
Passive Filters: Circuit Configurations and Transfer Functions
Passive filters can be designed in various circuit configurations to achieve desired frequency response characteristics. The four common circuit configurations are:
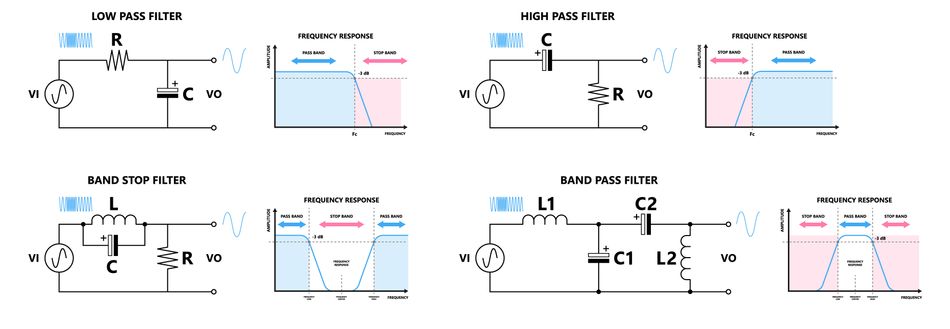
Low-Pass Filters
Low-pass filters pass low-frequency signals while attenuating high-frequency signals. The basic low-pass filter consists of a resistor (R) in series with a capacitor (C). The transfer function of a first-order low-pass filter is given by:

where s is the complex frequency variable. The cutoff frequency (fc) is determined by:

A simple example of a active low pass filter would be hard walls that attenuate high-frequency components of an audio wave. This is precisely the reason why low-frequency notes of any audio are more legible in the adjacent room.
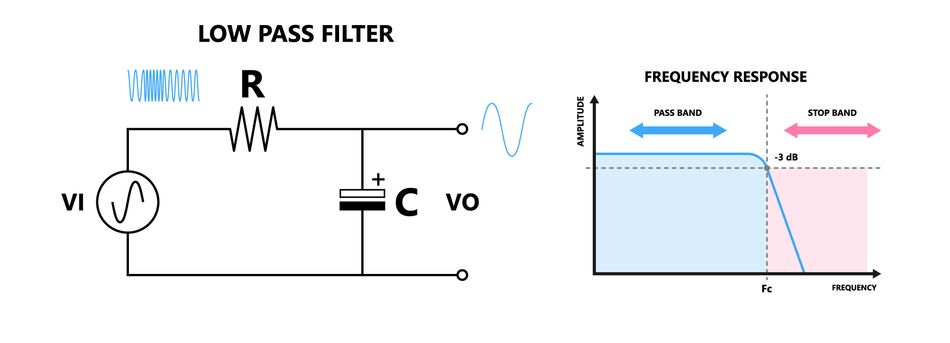
In the above figure, the pass band refers to the band of unattenuated frequencies, whereas the stop band refers to the attenuated ones. The frequency response curve is used to denote the response of the filter.
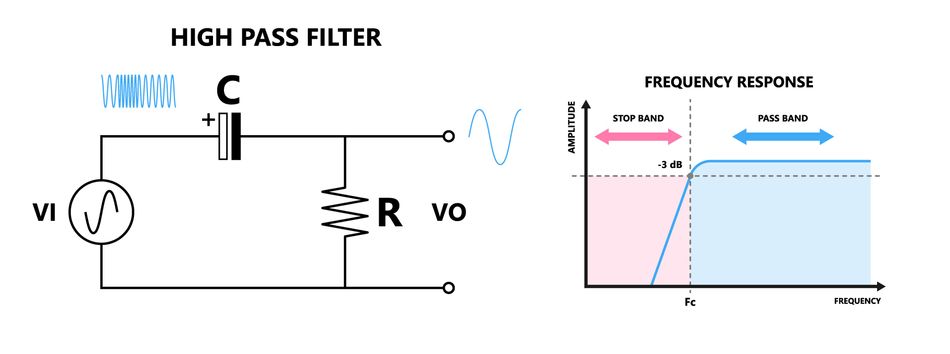
High-Pass Filters
High-pass filters pass high-frequency signals while attenuating low-frequency signals. The basic high-pass filter consists of a capacitor (C) in series with a resistor (R). The transfer function of a first-order high-pass filter is given by:

where s is the complex frequency variable. The cutoff frequency (fc) is determined by:

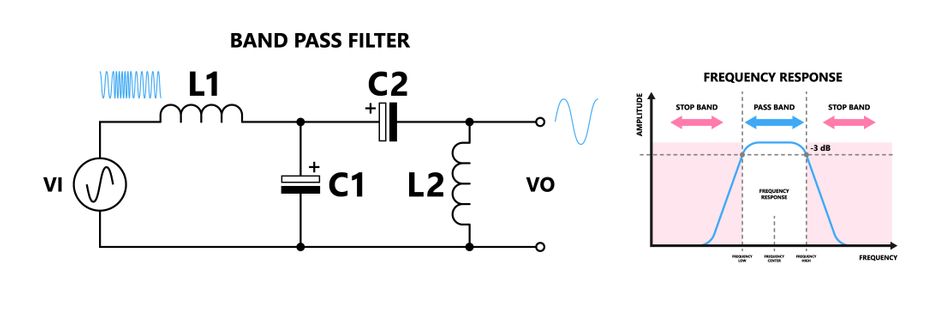
Band-Pass Filters
Band-pass filters pass a specific range of frequencies while attenuating frequencies outside that range. [5] A simple band-pass filter can be created by cascading a low-pass filter and a high-pass filter. The transfer function of a second-order band-pass filter is given by:

where Q is the quality factor, and ω₀ is the center frequency. The quality factor determines the bandwidth of the filter, with higher Q values resulting in a narrower passband.
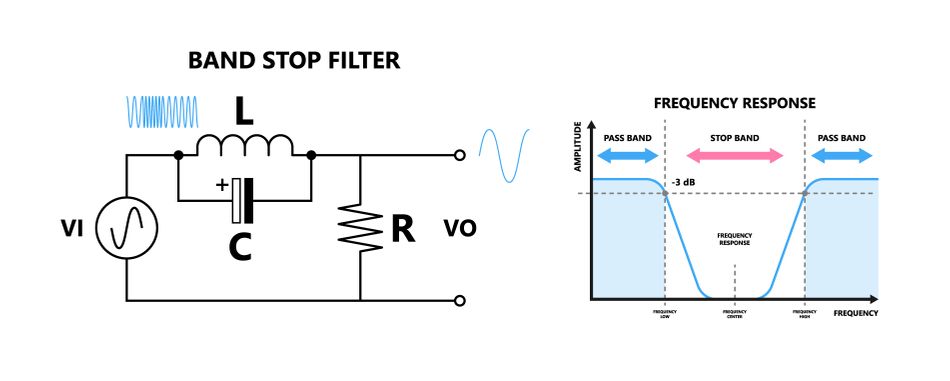
Band-Stop Filters (Notch Filters)
Band-stop filters, also known as notch filters, attenuate a specific range of frequencies while passing frequencies outside that range. A simple band-stop filter can be created by placing a series LC circuit in parallel with a resistor(R). The transfer function of a second-order band-stop filter is given by:

where Q is the quality factor, and ω₀ is the centre frequency of the stopband.
Passive Filter: Stability and Component Selection
Stability is a critical consideration in the design of passive filters. An unstable filter can lead to undesired oscillations, distortion, and even damage to the circuit. Filter stability is closely related to component selection and circuit design.
Factors Affecting Filter Stability
Component tolerances: Resistors, capacitors, and inductors have inherent tolerances that can cause the actual filter response to deviate from the designed response, potentially causing instability, especially in high-order filters or those with narrow passbands.
Parasitic effects: Parasitic inductance and capacitance introduced by components and circuit layout can create additional poles and zeros in the transfer function, leading to instability.
Guidelines for Component Selection
To ensure passive filter stability, engineers should follow these guidelines when selecting components:
Choose high-quality components with tight tolerances and low-temperature coefficients to minimize deviations from the designed response.
Consider the long-term stability and temperature coefficients of components to maintain filter performance over a wide range of operating conditions.
Use temperature-compensated components or design with wider tolerance margins when necessary to account for component variations.
Select components with low parasitic effects and use circuit layout techniques to minimize their impact, such as using surface-mount components and minimizing trace lengths.
Best Practices for Circuit Layout and Component Placement
Proper circuit layout and component placement play a crucial role in maintaining filter stability:
Place components close together to minimize parasitic effects and keep signal paths as short as possible.
Use ground planes and proper grounding techniques to provide a low-impedance return path for signals and reduce noise.
Employ shielding or isolation techniques when necessary to prevent coupling between different sections of the filter.
Simulation and Testing
In addition to component selection and circuit layout, designers should:
Simulate the filter design using realistic component models and perform sensitivity analysis to identify potential stability issues.
Prototype the filter and conduct thorough testing under various operating conditions to validate its stability.
Passive filters remain a fundamental building block in electronic circuits, offering a simple, cost-effective, and reliable solution for many signal processing applications. By understanding their basics, designers can make informed decisions when selecting the appropriate filter type and configuration for their specific requirements.
Recommended Reading: Mastering PCB Testing: Techniques, Methods, and Best Practices Unveiled
Passive Filter: Applications
Passive filters, known for their simplicity and reliability, are used across various electrical engineering domains. Key application areas for passive filters include radio frequency (RF) communication, power supply systems, and audio electronics.

In RF communication systems, passive filters are essential for frequency selection and interference reduction. For example, band-pass filters allow a specific frequency band to reach the receiver or transmitter, effectively isolating desired signals from unwanted RF noise or signals. [6] This capability is critical in environments with multiple frequency signals, ensuring clear communication channels.
Power supply systems utilize passive filters to mitigate ripple and noise in DC power signals. A common application is the use of low-pass filters to smooth out the output of rectifiers, ensuring a steady DC supply by attenuating the AC components. This is crucial for the stability of electronic devices and systems that require consistent power quality.
Audio electronics benefit significantly from passive filters for tone control and crossover networks. High-pass and low-pass filters are employed in speakers to direct specific frequency ranges to the appropriate drivers—tweeters for high frequencies and woofers for low frequencies. This separation enhances the audio quality and performance of the sound system by matching the speaker components to their optimal frequency ranges.
Furthermore, passive filters find applications in sensor signal conditioning, which help remove noise from sensor outputs before processing or display. By filtering out high-frequency noise, passive filters improve the accuracy and reliability of sensor measurements, essential for precise monitoring and control in industrial and scientific applications.
Other areas where passive filters are prominently used include automotive electronics, medical devices, and renewable energy systems, further highlighting their broad applicability and importance.
Factors Affecting Filter Performance
The performance of both passive and active filters can be influenced by various factors, such as component tolerances, temperature variations, and aging effects. These factors can cause deviations from the designed frequency response, leading to inaccuracies and instability in the filter's behavior.
Component Tolerances
Resistors, capacitors, and inductors have manufacturing tolerances that cause their actual values to differ from nominal values.
Variations can lead to shifts in cutoff frequency, changes in passband ripple, and variations in stopband attenuation.
Example: A 10% tolerance in a resistor value can cause a corresponding shift in the cutoff frequency of a first-order RC filter.
Temperature Variations
Component values, such as resistors, capacitors, and inductors, can drift with temperature changes.
Op-amp parameters, such as gain, bandwidth, and offset voltage, can also vary with temperature.
Temperature-induced changes can lead to shifts in cutoff frequency, variations in passband ripple, and changes in stopband attenuation.
Aging Effects
Components like capacitors and inductors can experience value changes due to environmental factors (humidity, vibration, heat, or chemicals).
Long-term drift in filter behavior can occur, causing gradual deviations from the designed frequency response.
Example: Electrolytic capacitors can experience a decrease in capacitance and an increase in equivalent series resistance (ESR) over time, affecting cutoff frequency and damping characteristics.
Impact on Accuracy and Stability
Shifts in cutoff frequency can lead to insufficient attenuation of high-frequency components, resulting in aliasing and signal distortion (e.g., in anti-aliasing filters).
Changes in passband ripple can cause variations in signal-to-noise ratio and affect overall system performance (e.g., in communication systems).
Mitigation Strategies
Design filters with sufficient tolerance margins to allow for component value variations without significantly affecting filter behavior.
Use components with tight tolerances and low temperature coefficients (e.g., precision resistors and capacitors) to reduce the impact of component variations and temperature changes.
Employ proper circuit layout and shielding techniques to minimize the influence of external factors, such as electromagnetic interference (EMI) and thermal gradients.
Perform regular calibration and maintenance of filter circuits to identify and correct any long-term drift or degradation in performance.
Design Challenges and Trade-offs
Designing active and passive filters comes with certain challenges and trade-offs that must be carefully considered to achieve the desired performance while meeting cost and complexity constraints.
Component Selection
Balancing high-performance components with cost, availability, and package size.
Component tolerances and parasitics can introduce variations in frequency response and affect filter stability.
Example: High-quality, tight-tolerance capacitors improve accuracy and repeatability of cutoff frequency but may come at a higher cost.
Circuit Optimization
Fine-tuning component values and circuit layout to achieve desired frequency response.
Time-consuming and iterative process, balancing optimal performance with design tool and fabrication process constraints.
Techniques like sensitivity analysis and Monte Carlo simulations help identify critical components and layout parameters.
Noise Reduction
Passive components (resistors, capacitors) can introduce thermal noise and shot noise.
Op-amps in active filters contribute to flicker noise and voltage noise.
External noise sources (power supply ripple, EMI) can couple into the filter circuit and degrade signal-to-noise ratio.
Mitigation: Careful component selection, proper grounding and shielding, optimized circuit layout.
Performance vs. Cost vs. Complexity Trade-offs
Increasing filter order improves selectivity and stopband attenuation but increases component count, cost, and design complexity.
High-performance op-amps enhance filter performance but may require more expensive components and increase power consumption.
Passive filters: Simple and linear but limited control over frequency response and larger component values for low-frequency applications.
Active filters: Greater flexibility and higher Q factors but require power supply and may introduce noise and distortion. [7]
Switched-capacitor filters: Compact and integrated but limited frequency range and require anti-aliasing filters.
Bringing a filter design from concept to reality requires navigating challenges and making informed choices. Analytical tools like SPICE simulations and frequency-domain analysis are useful, predicting filter behavior and allowing optimization of component values and circuit layout. For complex designs, optimization algorithms can automate the search for the best component combinations.
Filter Approximation Methods
Filter approximation methods, also known as filter synthesis techniques, are mathematical approaches used to design filters with specific frequency response characteristics. These methods provide a systematic approach to design filters with specific characteristics like passband gain, stopband attenuation, and transition bandwidth. The most common filter approximation methods are:
Butterworth Filter Approximation
This method prioritizes a maximally flat (smooth) response in the passband, resulting in a gradual roll-off from passband to stopband. It's a good choice for general-purpose filtering applications. The poles are evenly spaced around a circle in the s-plane, resulting in a stable and easily realizable filter.
Example of a third-order Butterworth low-pass filter transfer function:

Chebyshev Filter Approximation
Chebyshev filter approximation is a technique used in signal processing to design filters with a specific desired frequency response. Compared to Butterworth filters (another common filter design method), Chebyshev filters achieve a sharper transition between the passband (frequencies allowed to pass) and stopband (frequencies attenuated). This is useful when you need to strictly limit unwanted frequencies.
The trade-off for the steeper roll-off is the presence of ripples in the passband (Type I Chebyshev) or stopband (Type II Chebyshev). Ripple amplitude and steepness of the roll-off are controlled by filter order and ripple factor.
Type I: Equiripple in the passband and monotonic response in the stopband
Type II: Equiripple in the stopband and monotonic response in the passband
Example of a third-order Chebyshev Type I low-pass filter transfer function with a 0.5 dB passband ripple:

Elliptic Filter Approximation (Cauer Filter)
An elliptic filter approximation, also known as a Cauer filter (after Wilhelm Cauer) or Zolotarev filter (after Yegor Zolotarev), is another technique in signal processing for designing filters with specific frequency responses. Elliptic filters boast the fastest transition between the passband (desired frequencies) and stopband (attenuated frequencies) of any filter type for a given order (complexity).
Unlike Chebyshev filters with ripple in just the passband (Type I) or stopband (Type II), elliptic filters exhibit ripple in both the passband and stopband. This ripple has a constant amplitude within each band.
Example of a third-order Elliptic low-pass filter transfer function with a 0.5 dB passband ripple and 40 dB stopband attenuation:

Computer-Aided Design Tools for Filter Simulation and Optimization
Computer-aided design (CAD) tools play a crucial role in the simulation and optimization of filter circuits. These tools allow engineers to analyze filter performance, explore different design options, and optimize component values and circuit layouts without the need for physical prototyping.
SPICE (Simulation Program with Integrated Circuit Emphasis)
SPICE (Simulation Program with Integrated Circuit Emphasis) is a widely used tool in the realm of electronic circuit design, specifically for analog circuits. It functions as a software program that simulates the behavior of electronic circuits before they are physically built. SPICE is a powerful circuit simulation tool for modeling and analyzing filter circuits.
Capabilities:
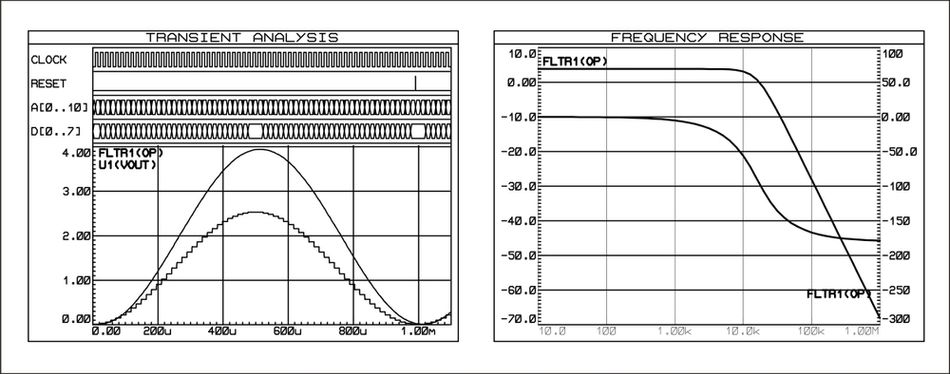
Transient analysis: Simulating the time-domain response of the filter to input signals
AC analysis: Determining the frequency response of the filter, including magnitude and phase plots
DC analysis: Calculating the operating point and bias conditions of the filter circuit
Monte Carlo analysis: Assessing the impact of component tolerances on filter performance
Example: SPICE netlist for a simple RC low-pass filter:
* RC Low-pass Filter R1 IN OUT 1k C1 OUT 0 1u Vin IN 0 ac 1 dc 0 .ac dec 10 1 1Meg .plot ac v(OUT) .end
MATLAB
MATLAB is a powerful software platform for filter design and optimization. It excels in data analysis, algorithm development, and creating models to simulate real-world phenomena. This tool has an extensive library of built-in functions and toolboxes to start with the projects easily.
Capabilities:
Filter synthesis: Designing filters based on specifications using functions like butter(), cheby1(), and ellip()
Frequency response analysis: Plotting the magnitude and phase response of filters using functions like freqz() and bode()
Filter optimization: Optimizing filter coefficients and parameters using optimization toolboxes like fminsearch() and fmincon()
Example: MATLAB code for designing a 4th-order Butterworth low-pass filter with a cutoff frequency of 1 kHz:
% Butterworth Low-pass Filter Design fs = 10000; % Sampling frequency (Hz) fc = 1000; % Cutoff frequency (Hz) n = 4; % Filter order [b, a] = butter(n, fc/(fs/2), 'low'); freqz(b, a, 1024, fs); % Plot frequency response
Other Popular CAD Tools

Keysight ADS stands out as a powerful Electronic Design Automation (EDA) tool specifically designed for RF and microwave circuit design and simulation. It boasts integrated electromagnetic simulation capabilities through its Momentum tool, allowing engineers to analyze critical factors like signal integrity, power integrity, and electromagnetic interference (EMI) within their designs. Keysight ADS provides an environment where engineers can design and optimize filters while considering their performance within the larger context of the entire system.
Cadence OrCAD is an industry-standard suite widely used for schematic capture, simulation, and layout tasks within the EDA field. For projects requiring advanced electromagnetic analysis, OrCAD integrates with Cadence EM Simulator, providing a robust solution. Cadence OrCAD maintains its focus on system-level design by offering seamless integration with Cadence Allegro, a popular and industry-standard PCB design tool. Finally, Cadence OrCAD includes filter design capabilities that allow engineers to consider the filter's role within the larger system during the design process.
Ansys Designer offers a comprehensive EDA experience by combining circuit design, simulation, and layout functionalities within a single platform. This all-in-one approach streamlines the design process. For in-depth electromagnetic analysis, Ansys Designer incorporates Ansys HF, a powerful simulation tool. The software seamlessly integrates with Ansys SIwave, a dedicated PCB design and signal integrity tool, ensuring a unified design environment throughout the project. Similar to Keysight ADS, Ansys Designer prioritizes filter design in context.
In summary, all three - Keysight ADS, Ansys Designer, and Cadence OrCAD - are powerful EDA tools that offer electromagnetic simulation capabilities, layout design features, and integration with PCB design software. They all allow engineers to design and optimize filters while considering their role within the larger electronic system. The choice of tool often depends on specific company preferences, existing software licenses, and the particular requirements of the design project.
Conclusion
Active and passive filters, while fundamentally different, are both valuable tools for shaping signals in electronic engineering. Understanding their strengths (passive: simplicity, linearity; active: flexibility, gain) is key to effective filter selection. Modern design techniques like filter approximations and computer-aided tools (SPICE, MATLAB) further empower engineers to optimize filter performance. The rise of digital signal processing necessitates expertise in both analog and digital filter design to create robust solutions for the ever-growing demand.
Frequently Asked Questions
Q. What are the main differences between active and passive filters?
A. Here are the differences:
Passive filters are constructed using only passive components (resistors, capacitors, and inductors), while active filters incorporate operational amplifiers alongside passive components.
Passive filters do not require a power source, whereas active filters need a power supply to operate.
Active filters can provide gain and have greater control over filter characteristics, while passive filters are limited in their ability to shape the frequency response.
Q. How do I choose between a passive and an active filter for my application?
A. Follow these tips:
Consider factors such as the desired frequency response, signal levels, power handling requirements, and available space and budget.
Passive filters are often preferred for high-power applications, low-frequency designs, and situations where simplicity and reliability are crucial.
Active filters are suitable for applications requiring high Q factors, precise control over filter characteristics, and the ability to introduce gain.
Q. What are the most common filter approximation methods, and how do they differ?
A. Butterworth, Chebyshev, and Elliptic are the most common filter approximation methods. These can be differentiated as:
Butterworth filters have a maximally flat response in the passband but a slower roll-off in the stopband.
Chebyshev filters have ripple in the passband (Type I) or stopband (Type II) but a steeper roll-off compared to Butterworth filters.
Elliptic filters have ripple in both the passband and stopband but offer the steepest roll-off among the three approximations.
Q. What are the key factors to consider when selecting components for a filter design?
A. Here are the key factors:
Consider the desired filter performance, such as cutoff frequency, passband ripple, and stopband attenuation.
Choose components with appropriate values, tolerances, and temperature coefficients to ensure the filter meets the specified requirements.
Take into account the power handling capabilities, voltage ratings, and parasitic effects of the components.
Q. How can computer-aided design tools assist in filter design and optimization?
A. CAD tools like SPICE and MATLAB allow engineers to simulate and analyze filter circuits, reducing the need for physical prototyping. These tools enable engineers to perform frequency response analysis, Monte Carlo simulations, and optimization of filter parameters. CAD tools can help identify potential issues, such as component tolerances and parasitic effects, and aid in selecting optimal component values.
Q. What are the advantages of digital filters over analog filters?
A. Digital filters offer programmability, adaptability, and the ability to achieve complex filter responses without the limitations of analog components. They are less susceptible to noise, drift, and component variations compared to analog filters. Digital filters can easily be integrated into digital signal processing systems and can be modified or updated through software changes.
Q. What are some common applications of active and passive filters in engineering?
A. Passive filters are used in power supply filtering, audio crossover networks, and RF and microwave signal conditioning. On the other hand, active filters are employed in applications such as audio equalizers, biomedical signal processing, and anti-aliasing filters for data acquisition systems. Both active and passive filters are used in telecommunications, control systems, and instrumentation to remove unwanted frequencies and improve signal quality.
References
[1] Sciencedirect. Chapter 8 - Prediction and Transforms [Cited 2024 April 9] Available at: Link
[2] Brahms. Chapter 12 - Active Filters [Cited 2024 April 9] Available at: Link
[3] Open. 2.5 Normalised First-Order Low-Pass Filters [Cited 2024 April 9] Available at: Link
[4] CTMS. Extras: Designing Lead and Lag Compensators [Cited 2024 April 9] Available at: Link
[5] electronics-tutorials. Passive Band Pass Filter [Cited 2024 April 9] Available at: Link
[6] allaboutcircuits. Understanding Linear-Phase Filters [Cited 2024 April 9] Available at: Link
[7] eng.libretexts. 11.3: The Use and Advantages of Active Filters [Cited 2024 April 9] Available at: Link
Table of Contents
IntroductionWhat are Filters in Electronic Circuits?Types of FiltersActive FiltersPassive FiltersTransfer Functions and Frequency ResponseFilter Order and Roll-Off RateCutoff Frequency and Passband/StopbandTransfer Functions for Common Filter TypesComponents Used in Active FiltersActive Filter: Circuit Configurations and Transfer FunctionsSallen-Key ConfigurationMultiple Feedback (MFB) ConfigurationState Variable Configuration (Kerwin-Huelsman-Newcomb Filter)Active Filter: Stability and Component SelectionOp-Amp SelectionPassive Component SelectionCircuit Layout and Component PlacementFeedback Loop DesignBest Practices for Stable Active Filter DesignActive Filter: ApplicationsComponents Used in Passive FiltersPassive Filters: Circuit Configurations and Transfer FunctionsLow-Pass FiltersHigh-Pass FiltersBand-Pass FiltersBand-Stop Filters (Notch Filters)Passive Filter: Stability and Component SelectionFactors Affecting Filter StabilityGuidelines for Component SelectionBest Practices for Circuit Layout and Component PlacementSimulation and TestingPassive Filter: ApplicationsFactors Affecting Filter PerformanceComponent TolerancesTemperature VariationsAging EffectsImpact on Accuracy and StabilityMitigation StrategiesDesign Challenges and Trade-offsComponent SelectionCircuit OptimizationNoise ReductionPerformance vs. Cost vs. Complexity Trade-offsFilter Approximation MethodsButterworth Filter ApproximationChebyshev Filter ApproximationElliptic Filter Approximation (Cauer Filter)Computer-Aided Design Tools for Filter Simulation and OptimizationSPICE (Simulation Program with Integrated Circuit Emphasis)MATLABOther Popular CAD ToolsConclusionFrequently Asked QuestionsReferences